

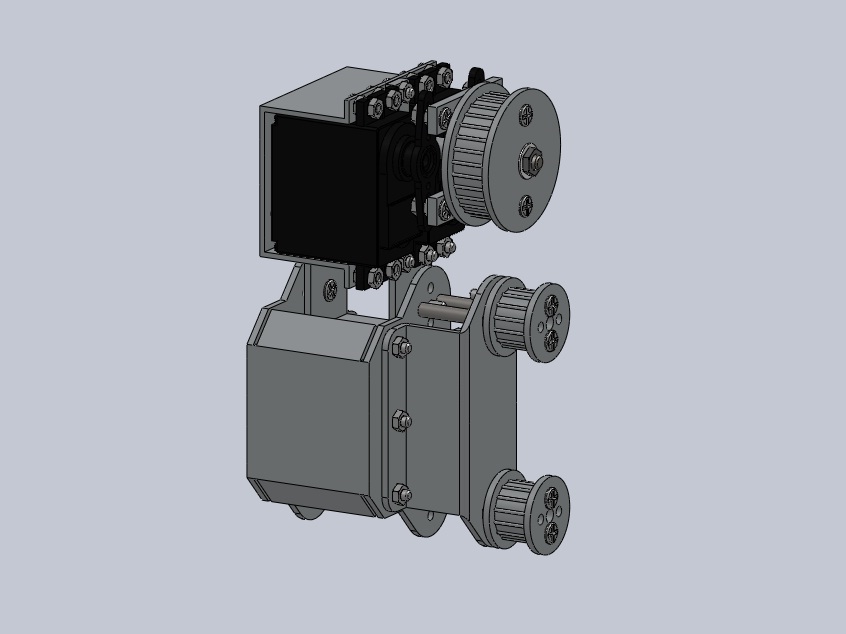
這個我知道^^皮帶的耐用度不輸鍊條,準度比鍊條好,不過..安裝時一定要繃緊才行.
這樣就不會跳牙,壽命也更長 ...
ufpatsai 發表於 2010-12-15 11:55


 看到了,謝謝!
看到了,謝謝!

回復 rayrider
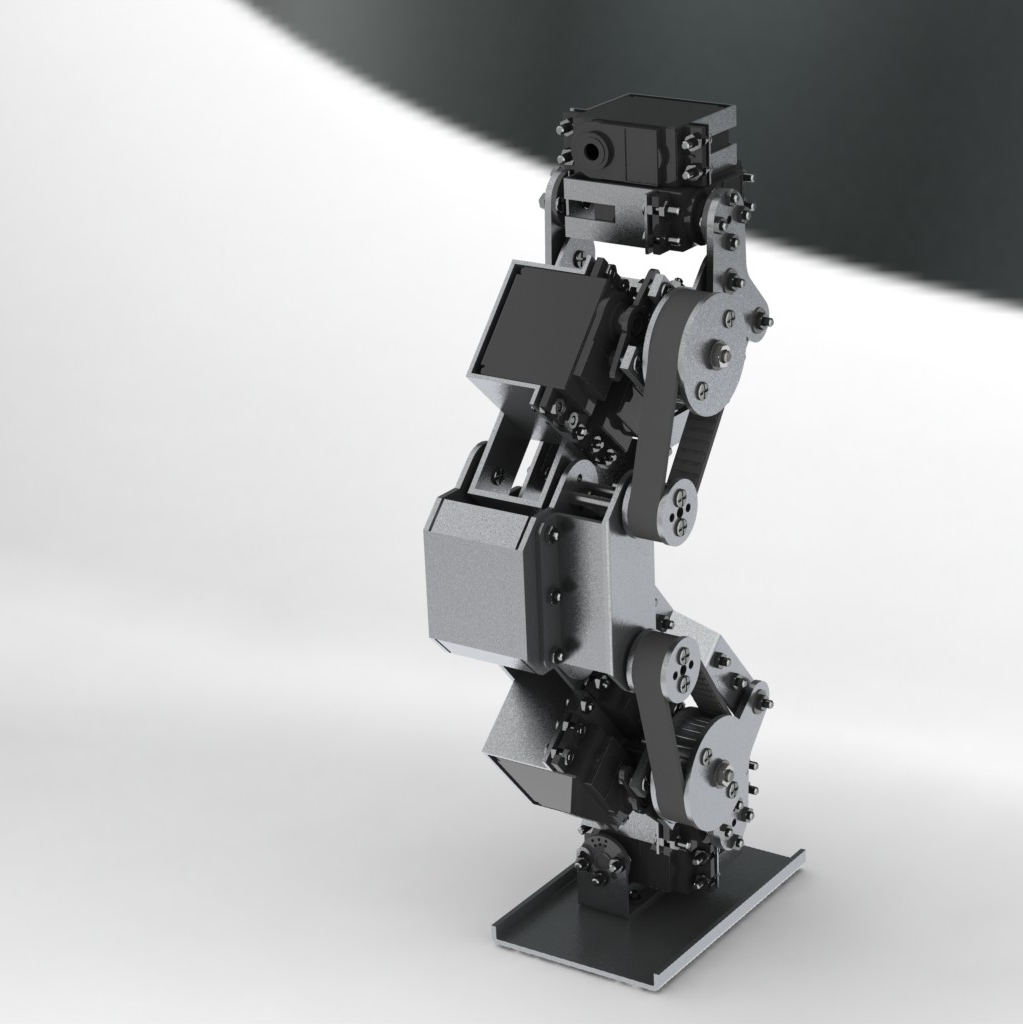
嗯,這個我也有想過,因為連桿是變矩的,力矩有一定範圍變動,想設計一種蹲下力矩大而 ...
leonids 發表於 2010-12-16 20:46
...
不好意思..因為最近比較忙,沒有跟進好自己的帖子,忽略了照片的問題,現在直接從電腦上傳,應該沒問題了
而大 ...
leonids 發表於 2010-12-16 14:28
回復 stanley21
大概明白~連桿用長度和位置可以實現它的不同角度,我最初是這樣想的,用二連桿來形成一 ...
leonids 發表於 2010-12-16 23:24

| 歡迎光臨 Robofun 機器人論壇 (https://robofun.net/forum/) | Powered by Discuz! X3.2 |
