Robofun 機器人論壇
標題:
[請教] A/D Channel 的接線方式...
[打印本頁]
作者:
tommylin
時間:
2010-7-26 15:10
標題:
[請教] A/D Channel 的接線方式...
本帖最後由 tommylin 於 2010-7-26 15:15 編輯
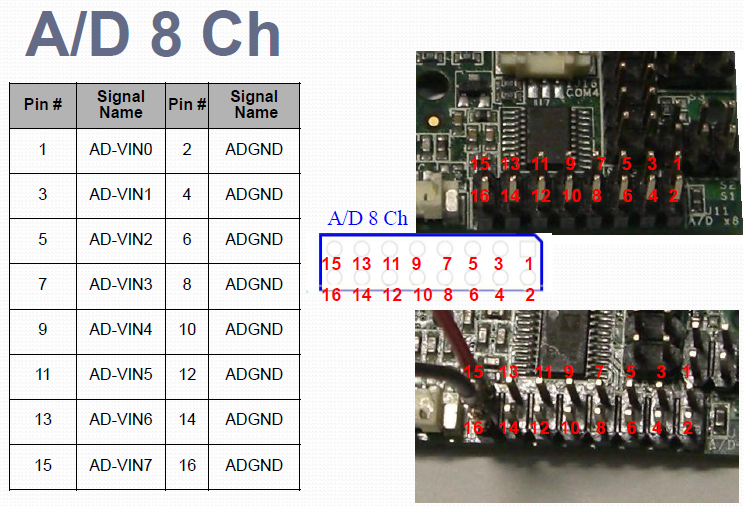
上圖是從 RB-100的手冊中抓下來的圖,
請問我要接 紅外線測距, 使用 Sharp GP2Y0A02 類比訊號輸出,
工作電壓 5V, 有 3 Pin ( 訊號, 正極, 接地 )
可是在 RB-100 的 8 組 A/D Channel 都只有2 Pin,
請問我應該怎麼接才對,
謝謝~
作者:
mzw2008
時間:
2010-7-26 17:02
gnd 接到ADGND
訊號接到ADVIN
VCC接到5V
作者:
mzw2008
時間:
2010-7-26 17:05
其實...robard上面應該全部都訊號出入口就好
VCC和GND就讓使用者自己搞定就好
這樣也比較不會有誤會
畢竟各種裝備的接線方式差很多
但是訊號主要就是一條或是兩條
最近我在研究是否可以做出類似擴充板的東西(Arduino那種概念)
和Roboard一樣大, 插上去直接可以使用馬達和AD/I2C之類的
電源都用這塊板供應, roboard就叫他吃自己的電就好
這樣也不會讓roboard搞得整片很複雜的感覺
作者:
tommylin
時間:
2010-7-26 18:37
感謝~感謝~
晚上回家馬上試試... 謝嚕~
作者:
tommylin
時間:
2010-7-26 22:49
Sharp GP2Y0A02 成功嚕~
從 I2C 拉出 +5V
然後接上..
A/D Pin 1 (信號)
A/D Pin 2 (接地)
換算電壓 -> 距離, 程式碼如下:
spi_Initialize(SPICLK_21400KHZ );
float volts;
float cm=0;
int channel = 0;
float VOLTS_PER_UNIT = 0.0049F; // (.0049 for 10 bit A-D)
int val = ad7918_ReadChannel ( channel, //channel = 0 ~ 7
AD7918MODE_RANGE_2VREF, AD7918MODE_CODING_1023);
volts = (float)val * VOLTS_PER_UNIT;
cm = 60.495 * pow ( (float)volts, (float)-1.1904);
作者:
mzw2008
時間:
2010-7-27 00:27
我個人是覺得..那個5V還是拉出來獨立給比較保險
不然馬達也要roboard養
然後I2C和AD都要roboard養
這樣有點負擔過大了
歡迎光臨 Robofun 機器人論壇 (https://robofun.net/forum/)
Powered by Discuz! X3.2