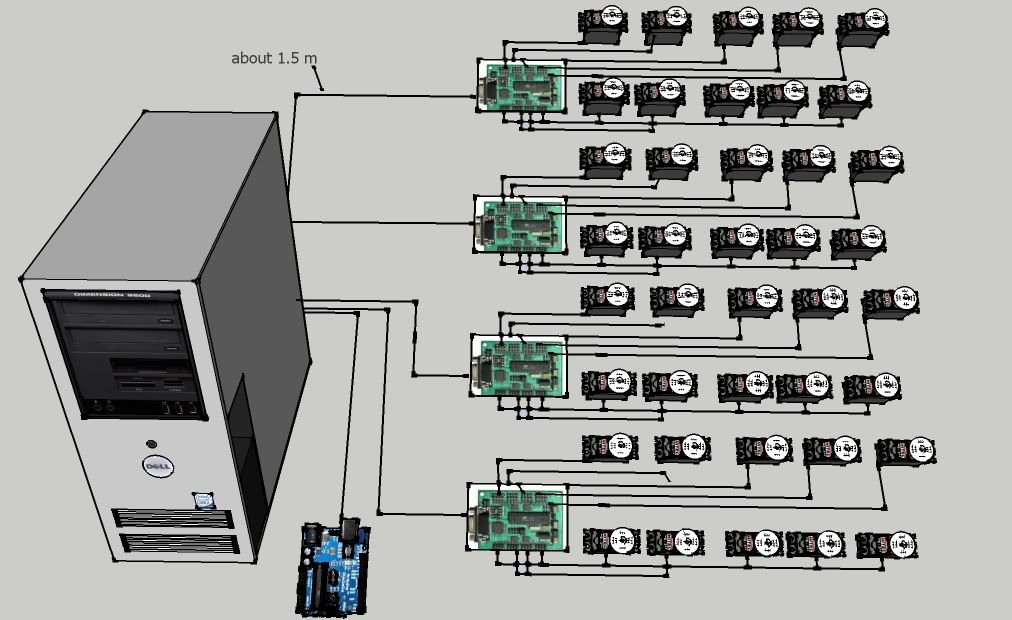
.....第三代 RoBoad 才有機會達成,三代的目標是可以同時接 36 組 AC 伺服機 (每顆 200W 以上的) 或者 72 組 PWM servo
.....lucrece_lu 發表於 2010-11-11 16:33

.....第三代 RoBoad 才有機會達成,三代的目標是可以同時接 36 組 AC 伺服機 (每顆 200W 以上的) 或者 72 組 PWM servo
.....lucrece_lu 發表於 2010-11-11 16:33
 換成小筆電來操作如下圖:
換成小筆電來操作如下圖: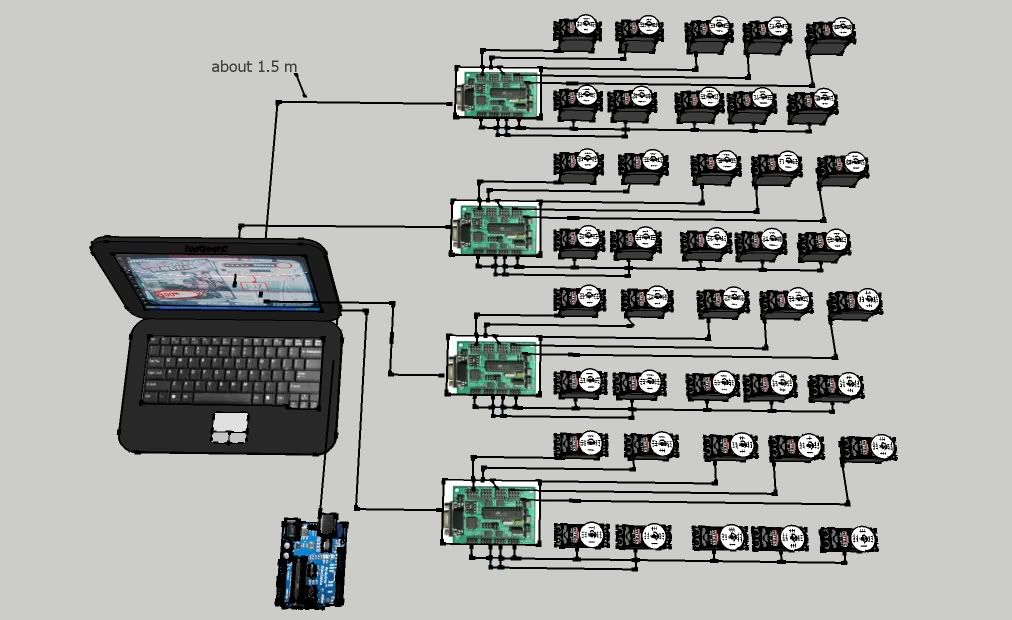




rayrider 大大 , " 大佬 " 不太好用 , 好像十多年前的一套港產片 " 英雄本色 " , 狄龍對張國榮說 : 我已沒有 ...
avkeith 發表於 2010-12-17 17:20



| 歡迎光臨 Robofun 機器人論壇 (https://robofun.net/forum/) | Powered by Discuz! X3.2 |
