回復 yao412030
這裡有很詳細的說明(6 SENSORS):
請仔細看過後,有問題再逐一的提出,
下圖除了藍 ...
vegewell 發表於 2011-9-18 21:28




回復 yao412030
這裡有很詳細的說明(6 SENSORS):
請仔細看過後,有問題再逐一的提出,
下圖除了藍 ...
vegewell 發表於 2011-9-18 21:28
這裡有人用四個, 放置 前 後 左 右不同方向,
你有沒有試過不同方向?
另外他們使用 LV-MaxSonar-EZ1 不是 ...
vegewell 發表於 2011-9-18 19:20
大大您第二個網址我不能開欸....
小弟我還會多多研究!!!
先謝謝您!
yao412030 發表於 2011-9-18 21:57
我的是要同一方向放在左右邊不同位置,而我是買MaxSonar-EZ1請問還可以照接嗎??
http://twitpic.com/5s0yp9/full這是我找到的圖....他好像是Daisy Chaining with Constantly Looping
他的藍色線我有點搞不懂,他是三個sensor的AN拉出來接在一起在拉到ARDUINO的ANALOG即可??
還是三個連線一起之後再一個一個另外拉線出來到ARDUINO的ANALOG接腳呢??
有點看不懂還請大大指導!!!
yao412030 發表於 2011-9-18 21:59

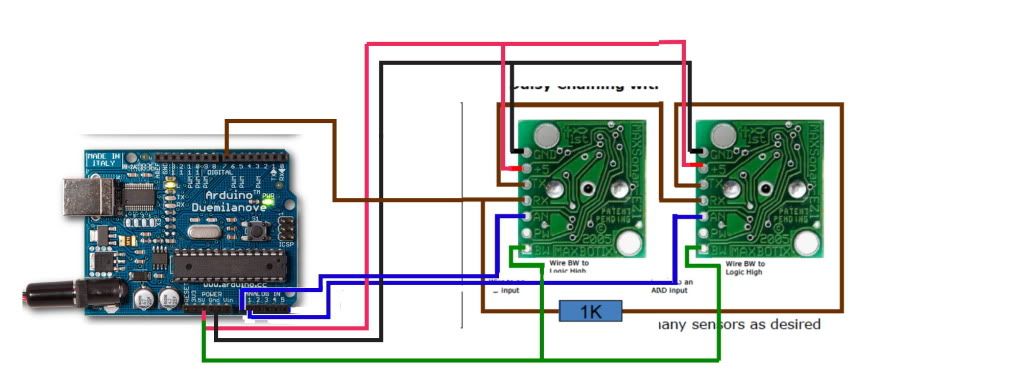
依照那國外做者,請先試試下圖的接法:
arduino的程式如下
int ultraSoundSignalPins[] = {0, ...
vegewell 發表於 2011-9-19 17:25


| 歡迎光臨 Robofun 機器人論壇 (https://robofun.net/forum/) | Powered by Discuz! X3.2 |
