標題: ZMP 零力矩點 Zero Moment Point [打印本頁] 作者: Mick 時間: 2007-5-11 15:34 標題: ZMP 零力矩點 Zero Moment Point 在雙足機器人的研究中,ZMP (Zero Moment Point)佔了很重要的地位。
有名的例子,像是Honda的Asimo就是利用ZMP的相關理論來達到雙足機器人的步行和平衡。
以下將對ZMP做一個簡單的介紹。
Vukobratovic[1]於1968年提出ZMP(Zero-Moment Point)這個觀念,到了80年代早稻田的加籐一郎實驗室(Ichiro Kato's laboratory at Waseda University)製作了一系列的WL機器人,這些雙足機器人是最早將此概念實際應用到動態平衡的雙足步行。
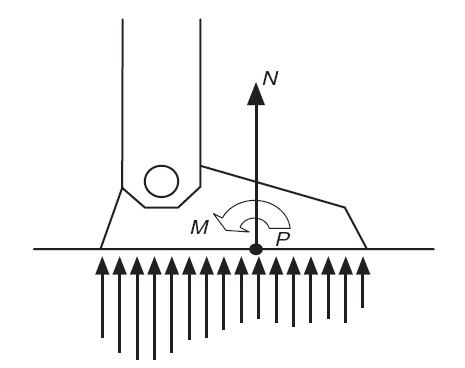
如Fig. 1所示,腳在接觸地面時有反作用力(N)也會產生力矩(M)。若存在一點(P)其反作用力、慣性力的淨力矩和為零的點稱之為零力矩點(ZMP Zero Moment Point)[2]。
那ZMP有什麼用呢?
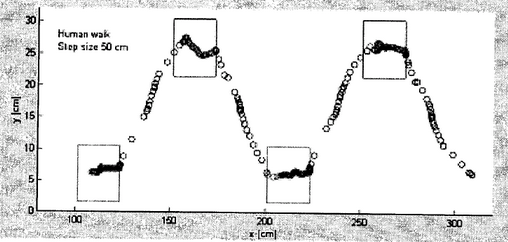
如果ZMP落在腳掌的範圍裡面,則機器人可以穩定的行走[3]。
Fig. 2 為人類行走時的ZMP。 Fig 1.Concept of ZMP
Reference:
[1] M. Vukobratovic, B. Brovac, D. Surla, and D.Stokic, "Biped Locomotion," Springer-Verlag, 1990.
[2] F. Erbatur, A. Okazaki, K. Obiya, T. Takahashi, and A. Kawamura, "A study on the zero moment point measurement for biped walking robots," Proc.7th Int. Workshop on Advanced Motion Control, 2002, pp. 431–436.
[3] Q. Huang, S. Sugano, and K. Tanie, 「Stability Compensation of a Mobile Manipulator by Manipulator Motion: Feasibility and planning,」 Advanced Robotics, vol. 13, no. 1, pp. 25–40, 1999.作者: imas 時間: 2007-5-11 16:43
讚喔...作者: scrush 時間: 2007-5-13 23:30
恩,除了ZMP之外,還有很多基本機器人的學問
像是順向.反向運動學,擺線輪廓曲線.....等等
不過大大寫的理論很不錯
加油喔^^作者: Mick 時間: 2007-5-14 20:43 標題: 回復 #3 scrush 的帖子 呵呵~感謝指教!
"傳統的機械領域,都是去建立雙足機器人的數學模型,並根據ZMP必須落在穩定區域(腳掌範圍)去推導控制法則。"
其實我是想偷偷地用這一句話想要帶過這些東西
不過有興趣的人其實可以去參考reference或是上碩博士論文網找資料
可以找到scrush所說的那些基本機器人的學問
市面上其實也有幾本中文書籍有詳細提到。
但是因為這裡面的數學很多,而且接下來我想介紹一下不用推導這些運動學,一樣可以求解ZMP的方式
所以這方面的資料,就在這裡先略過囉~~~作者: imas 時間: 2007-5-14 22:29
期待分享中...