在雙足機器人的研究中,ZMP (Zero Moment Point)佔了很重要的地位。
有名的例子,像是Honda的Asimo就是利用ZMP的相關理論來達到雙足機器人的步行和平衡。
以下將對ZMP做一個簡單的介紹。
ASIMO相關資料及照片出處:Honda-Asimo
Vukobratovic[1]於1968年提出ZMP(Zero-Moment Point)這個觀念,到了80年代早稻田的加籐一郎實驗室(Ichiro Kato's laboratory at Waseda University)製作了一系列的WL機器人,這些雙足機器人是最早將此概念實際應用到動態平衡的雙足步行。
如Fig. 1所示,腳在接觸地面時有反作用力(N)也會產生力矩(M)。若存在一點(P)其反作用力、慣性力的淨力矩和為零的點稱之為零力矩點(ZMP Zero Moment Point)[2]。
那ZMP有什麼用呢?
如果ZMP落在腳掌的範圍裡面,則機器人可以穩定的行走[3]。
Fig. 2 為人類行走時的ZMP。
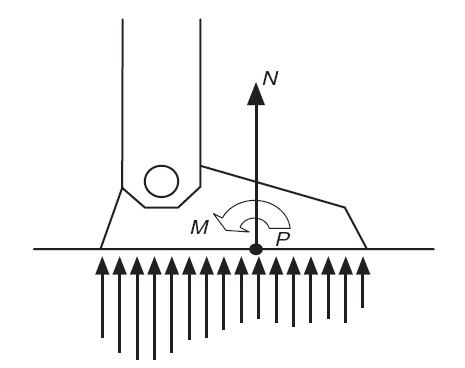
Fig 1.Concept of ZMP
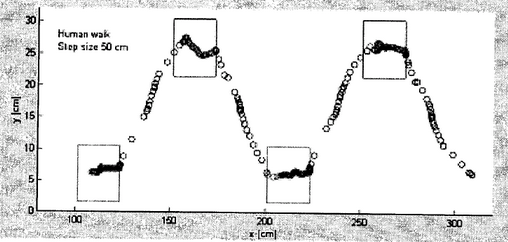
Fig.2 人類行走之ZMP
reference[1]這一本書裡面針對ZMP有詳盡的介紹,有興趣的人可以去找來看。
很多的雙足機器人研究都是基於ZMP的方法。但是利用的方式各有巧妙不同。
傳統的機械領域,都是去建立雙足機器人的數學模型,並根據ZMP必須落在穩定區域(腳掌範圍)去推導控制法則。建立雙足機器人的數學模型,本身就是一件很複雜的事。即便是可以建立出符合真實機器人的數學模型,但進一步去求解控制法則,所需要的數學運算更是一件困難的工作。早期的研究光是能正確地推導及求解雙足機器人的數學模型就足夠上一流的期刊。雖然不是一件簡單的工作,但是如果能正確地推導出數學模型,便可以利用這些數學模型去寫程式,用電腦來作模擬。
後記:
很久沒有寫機器人相關的事情。嘗試將一些比較基礎的東西,試著以所有人都可以瞭解的方式表達。後續會繼續將雙足機器人相關的文獻和目前手邊進行的研究,慢慢地整理發表,還請各位多多指教。
另外歡迎使用這些資料,但請記得附上本文出處。
Reference:
[1] M. Vukobratovic, B. Brovac, D. Surla, and D.Stokic, "Biped Locomotion," Springer-Verlag, 1990.
[2] F. Erbatur, A. Okazaki, K. Obiya, T. Takahashi, and A. Kawamura, "A study on the zero moment point measurement for biped walking robots," Proc.7th Int. Workshop on Advanced Motion Control, 2002, pp. 431–436.
[3] Q. Huang, S. Sugano, and K. Tanie, 「Stability Compensation of a Mobile Manipulator by Manipulator Motion: Feasibility and planning,」 Advanced Robotics, vol. 13, no. 1, pp. 25–40, 1999. |







 發表於 2007-5-11 15:34:03
發表於 2007-5-11 15:34:03

 收藏
收藏 分享
分享
 發表於 2007-5-13 23:30:55
發表於 2007-5-13 23:30:55
 樓主
樓主