|
23734| 32
|



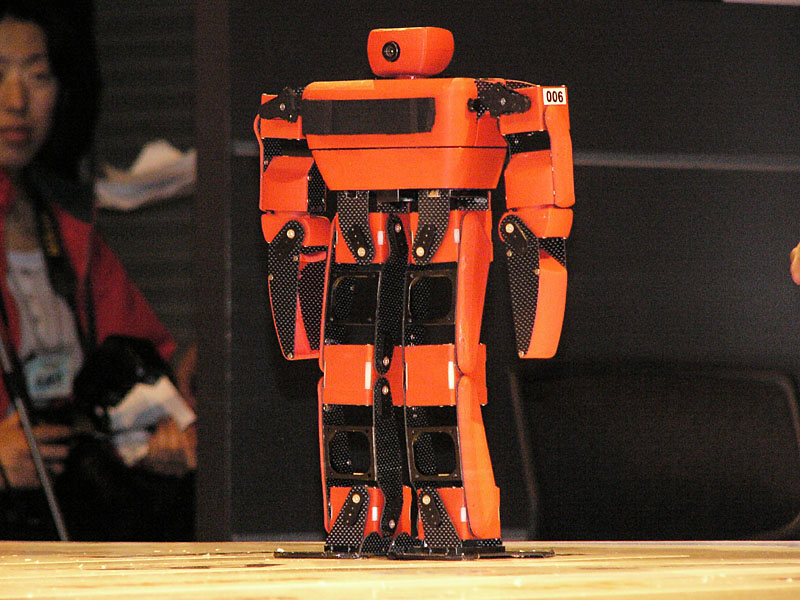
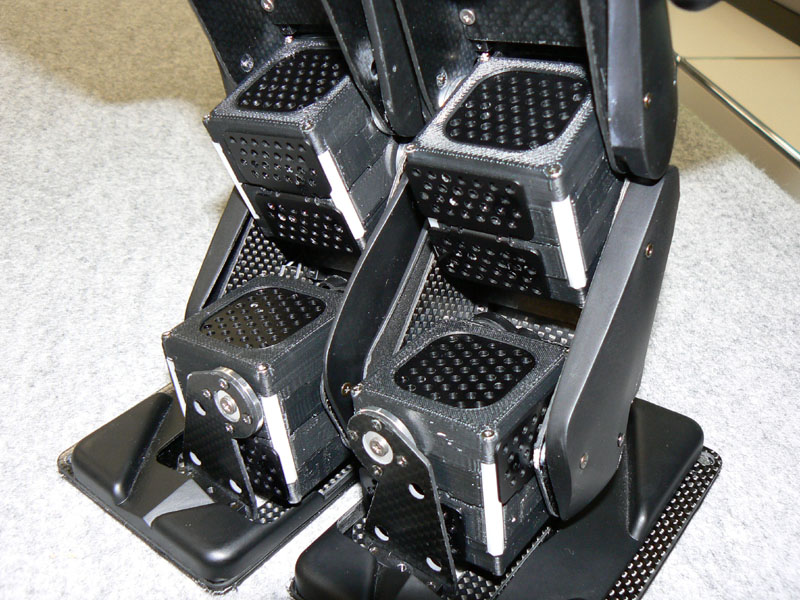
全新設計的雙足機器人 完成啦 有照片喔 |
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
回覆 #12 setuna 的文章
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
回覆 #16 lakers3411 的文章
| ||
|
|
||
| ||
|
|
||
| ||
|
|
||
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-8 20:27 , Processed in 0.294370 second(s), 10 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.




 發表於 2006-6-3 14:35:02
發表於 2006-6-3 14:35:02




 收藏
收藏 分享
分享 發表於 2006-6-3 22:10:03
發表於 2006-6-3 22:10:03
 樓主
樓主