|
本帖最後由 a9b93 於 2016-4-6 12:54 編輯 感謝mike2016以及超新手的耐心回答,謝謝謝謝謝謝。 結果 我把東西寄回去給廠商,廠商也說壞了,但是對方就不願意負責賠償了,因為過了法律規定的7天鑑賞期;因為時間及安裝問題實在沒辦法七天內全部零件測試一次(尤其對新手來說),就提醒大家在買套件的時候記得要問保固期....  。我買新的就可以了...。 。我買新的就可以了...。 再次感謝mike2016以及超新手的耐心回答,謝謝謝謝謝謝。 |
|
4 都不行, 那凶多吉少了 如果只是單純 4 不行, 有可能是BAUDRATE 被設成非 9600 的值 不過因為之前也做過迴路的測試以及相關測試 所以看起來... |
|
1)Arduino IDE 是 1.6.7版本 2)我試過xp 和 紅米not手機 也不行 3)我沒有用過accessport 我有用過putty 嘗試連線 不行 4)我沒有uart的線,我參考這邊的網址 http://gsyan888.blogspot.tw/2014/03/arduino-hc-06-at-command.html 的 以 Arduino 與 HC-06 連線 這個步驟連線 也不行...... 5)阿~~~~~~~~~~~~~~~~~~~ |
|
1) Arduino IDE 是 1.6.X 版的嗎? 2) 看看要不要換個作業系統或電腦測一下. WIN8 穩定性一向讓人會有很多疑慮.. 3) 不要用 Arduino IDE. 改用 AccessPort 試看看 4) 如果是藍芽模組本身的問題, 就比較難測 如果有 usb 轉 uart 的線, 可以接上去, 打 'AT' 應該會回 'OK' |
|
本帖最後由 a9b93 於 2016-3-30 11:21 編輯 我第一個步驟 把rx 和 tx 接起來 vcc 和 gnd跟 shield接起來 然後板子跟電腦沒有接 usb線 透過藍芽com5 用序列監控視窗 打字給它 沒辦法出現字 第二個步驟 馬達應該沒問題 因為之前提供的步驟 就需要動馬達 所以馬達部分應該沒問題.. |
|
先分別測試 1. 測藍芽 把藍芽的 RX 和 TX 接起來, 但不要接到 Shield, 這樣就會形成一個迴路 vcc 和 gnd 當然要接, 所以你在序列監控視窗打什麼字, 下方就會出現一樣的字 2, 測馬達 loop 改為以下(其他不變), 馬達會走走停停, 看看馬達或其他有沒有問題' void loop() { advance(50); stopRL(50); } |
| 互換都不行, 應該就不用量了 |
|
我嘗試了rx tx 交叉 但似乎還是無法; 我不知道怎麼用電表量,我插上電源拔掉hc-06以後直接量嗎?還是要插著hc-06按指令? |
本帖最後由 超新手 於 2016-3-29 13:05 編輯 
你有三用電表嗎?量一下Shield 的 RX 是接到上圖的那一根 PIN 或是直接 RX TX 交叉試看看 因為根據網路上的資料 板子印出來的字是剛好反的, 剛好就和你說的一樣 TX 印成 RX, RX 印成 TX |
|
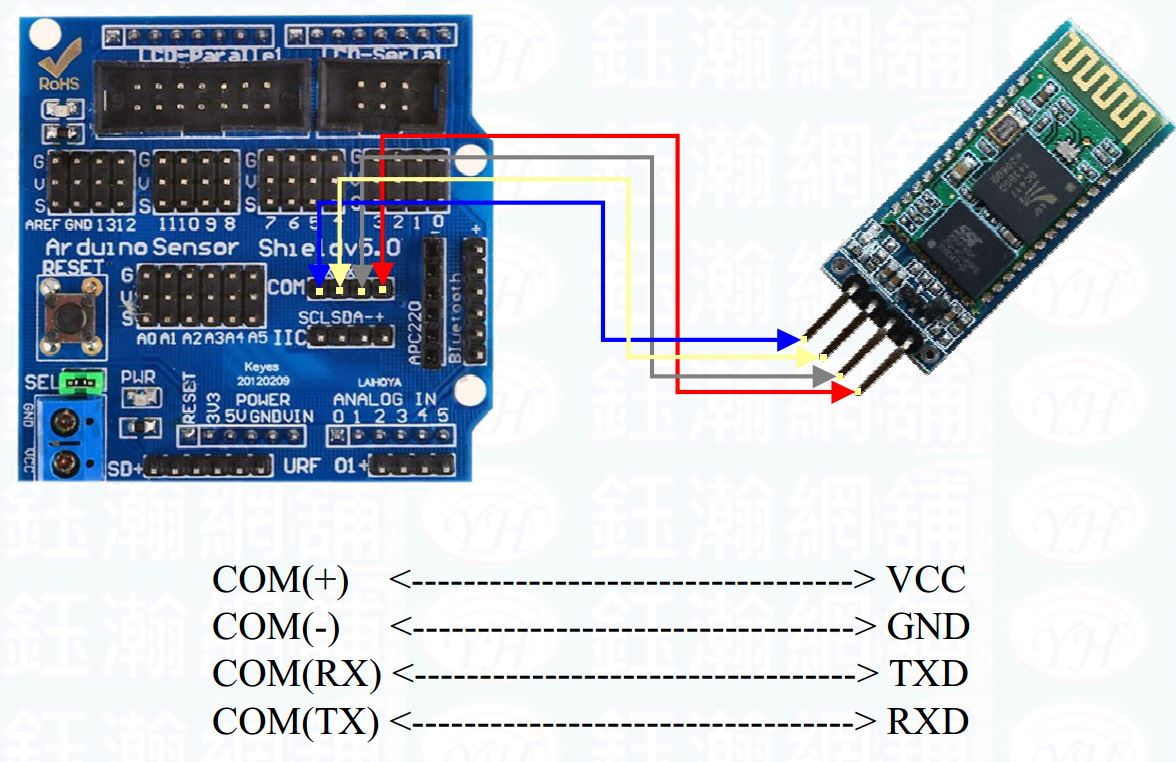
本帖最後由 超新手 於 2016-3-29 08:24 編輯 我沒原廠資料, 可能是網路上的資料有誤造成 因為從下圖來看 不管是 HC-06或Arduino Sensor Shield 的 RX 都在最旁邊 所以如果要接, 四條線中的 RX 和 TX 應該要相交(黃色和藍色線) 而不是像你圖中所示, 四條線一對一對接 不過...當然以你手上的為主, 因為上面都有字, 你不可能看錯
|
| 圖上 就是RX 接 TX, TX 接 RX,我組的也是... |
|
本帖最後由 超新手 於 2016-3-28 21:34 編輯 為什麼根據我查到的資料 你的圖好像是錯的, 你好像 TX接TX, RX接RX 上面應該都有字, 很好查, RX 要接 TX, TX 要接 RX 不過.....也可能是我查到的資料有誤 |
|
本帖最後由 超新手 於 2016-3-29 08:22 編輯 1) 看程式是接到接腳 0 和 1, 你接對了嗎? 2) 它是電路已經接好, 還是你自己接的? 3) 所以你按了大寫的 A, S, D, W並且按了傳送, 但馬達不會轉, 是嗎? |
|
TO 超新手 感謝您的解答 程式碼 似乎沒提到用哪兩根腳?? 以下是使用的程式碼 // L298N 馬達驅動板 #define MotorR_I1 8 //定義 I1 接腳 #define MotorR_I2 9 //定義 I2 接腳 #define MotorL_I3 10 //定義 I3 接腳 #define MotorL_I4 11 //定義 I4 接腳 #define MotorR_ENA 5 //定義 ENA (PWM調速) 接腳 #define MotorL_ENB 6 //定義 ENB (PWM調速) 接腳 void setup() { Serial.begin(9600); pinMode(MotorR_I1,OUTPUT); pinMode(MotorR_I2,OUTPUT); pinMode(MotorL_I3,OUTPUT); pinMode(MotorL_I4,OUTPUT); pinMode(MotorR_ENA,OUTPUT); pinMode(MotorL_ENB,OUTPUT); analogWrite(MotorR_ENA,500); //設定馬達 (右) 轉速 analogWrite(MotorL_ENB,500); //設定馬達 (左) 轉速 } void advance(int a) // 前進 { digitalWrite(MotorR_I1,HIGH); //馬達(右)順時針轉動 digitalWrite(MotorR_I2,LOW); digitalWrite(MotorL_I3,HIGH); //馬達(左)逆時針轉動 digitalWrite(MotorL_I4,LOW); delay(a * 100); } void turnR(int d) //右轉 { digitalWrite(MotorR_I1,LOW); //馬達(右)逆時針轉動 digitalWrite(MotorR_I2,HIGH); digitalWrite(MotorL_I3,HIGH); //馬達(左)逆時針轉動 digitalWrite(MotorL_I4,LOW); delay(d * 100); } void turnL(int e) //左轉 { digitalWrite(MotorR_I1,HIGH); //馬達(右)順時針轉動 digitalWrite(MotorR_I2,LOW); digitalWrite(MotorL_I3,LOW); //馬達(左)順時針轉動 digitalWrite(MotorL_I4,HIGH); delay(e * 100); } void stopRL(int f) //停止 { digitalWrite(MotorR_I1,HIGH); //馬達(右)停止轉動 digitalWrite(MotorR_I2,HIGH); digitalWrite(MotorL_I3,HIGH); //馬達(左)停止轉動 digitalWrite(MotorL_I4,HIGH); delay(f * 100); } void back(int g) //後退 { digitalWrite(MotorR_I1,LOW); //馬達(右)逆時針轉動 digitalWrite(MotorR_I2,HIGH); digitalWrite(MotorL_I3,LOW); //馬達(左)順時針轉動 digitalWrite(MotorL_I4,HIGH); delay(g * 100); } void loop() { int cmd = Serial.read(); // 讀取藍芽指令 switch(cmd) // 執行藍芽指令 { case 'S': // 倒車 back(5); break; case 'A': // 左轉 turnL(5); break; case 'D': // 右轉 turnR(5); break; case 'W': // 前進 advance(5); break; case 'Q': // 停止 stopRL(5); break; } } |
|
如果紅燈恆亮, 那大致上, 配對和連線都沒問題 你的程式是使用那兩根腳? TX, RX 接對嗎? |
|
感謝 MIKE2016 您的回答 我先將我的筆電與HC-06配對,然後輸入密碼,然後到控制台裡面找尋藍芽的設定,找到說 COM5是HC-06連出,COM6 7 8 是連入,然後我開程式出來,點選工具 選擇 序列埠 COM5 然後打開序列埠監控視窗,這時候我看HC-06的燈就一直亮著,但是我在序列埠監控視窗輸入相關指令時;機器人似乎都不會動。還是我有漏掉甚麼步驟嗎? |
|
要先配對。先開啟筆電藍芽配對。也可以先用手機配對。如果手機能配對,筆電就能配對。 配對完,在看連上哪一個com. |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-5 05:50 , Processed in 0.187257 second(s), 12 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏