| 嗚嗚 因為齒輪部分的延遲這個項目還卡著還沒開始~ |
|
一點想法 , 以伺服馬達的角色來說 , 應該一開始是 ''使盡全力'' 轉 , 到達接近目標角度前開始放慢 , 當然理想的模型是 ''剛好''停在目標角度 , 不要回頭 , 但是這不太容易 , 伺服馬達有負擔 , 需要伺服馬達出手去保持目標角度 , 假設你想控制伺服馬達的扭力 , 有可能會讓馬達處於幾乎停轉的境界 , 這馬達很容易燒掉 , 除非一直''換向''讓馬達維持現狀 , 但這會讓伺服馬達發抖 要控制伺服馬達轉''慢'' 可以從訊號端下手 , 上述的一些參數應該是要考量齒輪的慣性 ,馬達的出力和一些磨擦力等 |
| 嗯嗯 下週訂購的 MLX90316 就到貨了,到時候用實驗檢驗結果 |
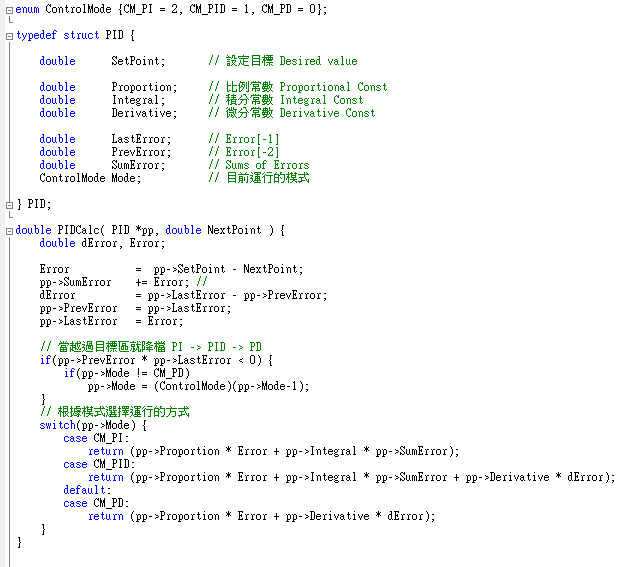
| 可以把 P 設小點, 變化就不會太快 |
|
我亂猜的...... 這個範例的 nowpoint 是計算而來 如果要上真的馬達, 必須有一個"位置偵測感知器", 而實際的 nowpoint , 就從這個"位置偵測感知器"讀回來 去取代最後一行的程式 也就是用真的感器去取代 nowpoint += (fabS(Power)>25........ |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-8-3 18:57 , Processed in 0.393063 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏