|
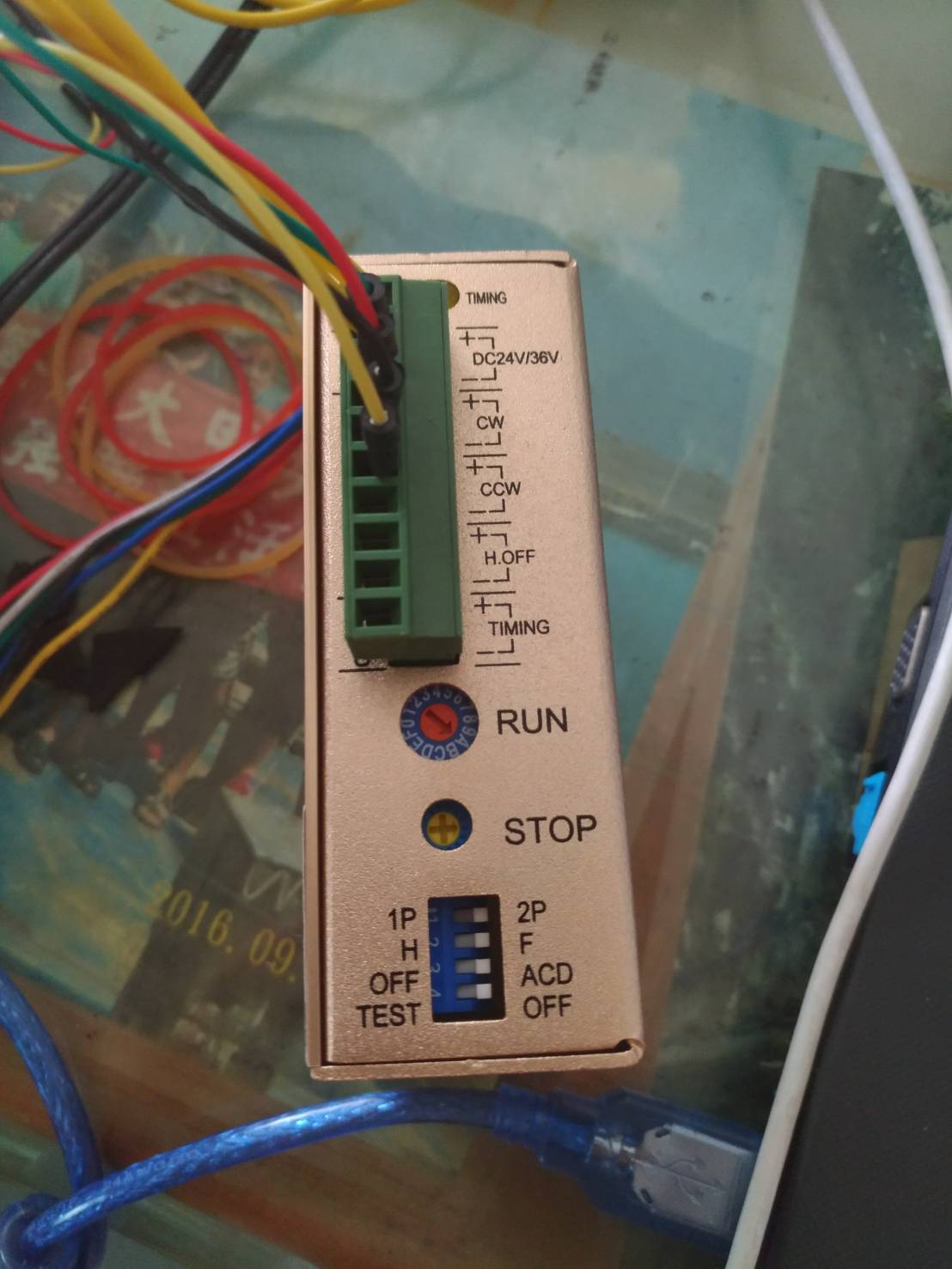
因為你切到 2P 模式 所以如果要正轉一步, 就用 digitalWrite(CW, HIGH); delay(1); digitalWrite(CW, LOW); delay(1); 就可以了 反轉, 就改用 CCW 而調整轉速, 調整 delay 的參數值就可以了(如 1 改成其他值) 這個好像也有現成 library 可呼叫 找一下就有了 |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-5 05:39 , Processed in 0.278738 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏