|
lakers3411大,我看過你的網站,的確要再多點東西,剛好我以前也是專門在 寫網站的,有機會可以幫你改一下,看過你的ROBOT質感很好,以你的成品為 我的目標~~~~加油呀 |
|
其實不一定要金屬齒啦 機構的設計和程式的調整 也能避免崩齒哩 關鍵受力特大的地方在換金屬齒就好, 不注重機構, 程式亂寫, 就算是995照樣容易崩牙哩 |
| 這個鐵皮機器人用995舵機啦,你的塑料齒輪太差勁~ |
|
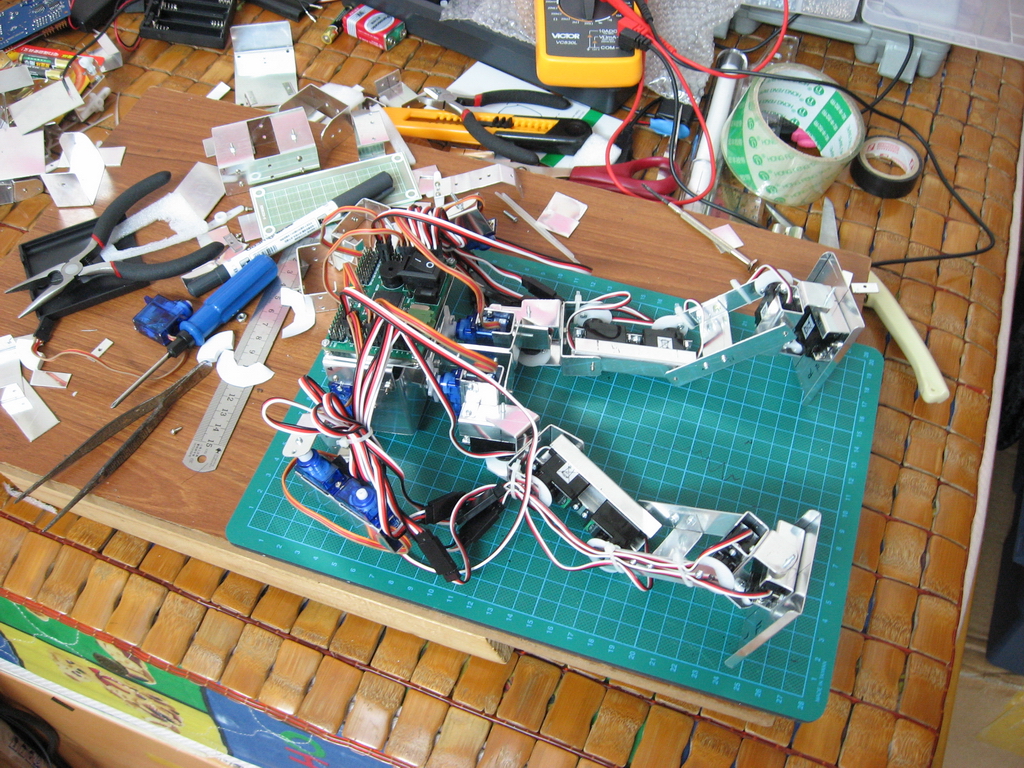
有圖有真相 全塑齒應該不會太重才是..... |
 這款SERVO不是名廠的產品,用的人比較少,也比較難買 這款SERVO不是名廠的產品,用的人比較少,也比較難買不過它標稱的特性還是挺吸引人的 希望它有良好的表現啦 |
| 大哥是在大陸買的嘍,請問版上有人在這兒買得到嗎? |
本帖最後由 mashirito 於 2009-3-11 12:54 編輯  報告nichal 大大 報告nichal 大大今天已經訂了這款SERVO,三天內到貨~ 到時小弟將會把使用感受寫出來跟大家分享 |
|
大大您好 其實所有的SERVO都有它對應適用的場合 合不合用也是要實際試了才知道 如果您有興趣 不妨試試看這款SERVO 再把特性提供給大家參考~~~  |
不加電時用手轉 十分感謝nichal前輩的解答~解開了我的疑惑~ 我之前一直認為手轉力道小的就是質量好的,看來不這麼簡單哦~ 如果是這樣的話,用來做機器人的SERVO,不僅扭力要夠大,不加電時還要力道夠大,以致我們的機器人不像麵條那樣軟巴巴的才最完美吧 我剛發現有一款SERVO聲稱有"剎車"功能,即使不加電的情況下也能保持角度哦,下面是那款SERVO的介紹,不知道用來做機器人是不是絕配呢~~ 很想拿幾個來測試測試呢~~ D1001是由BLUEARROW最新推出的微型數字伺服舵機,它能夠廣泛應用於電動遙控直升機、小型電動固定翼飛機、遙控車和遙控船。其可靠的品質和優秀的性能可為您的遙控電動模型帶來無與倫比樂趣。 |
|
不加電時用手轉 力道小有兩種原因 一是齒隙大 二是減速比小 換句話說 在出力時產生的損耗較小 但維持角度所需要的耗電較大 一般來說 扭力較大的SERVO 齒箱的齒隙又夠小的話 轉起來應該是頗費力的 但如果真要比較 得拿同標準同等級的SERVO來試 如果本來就不同等級 試了也沒多大意義 提供您參考看看囉~~~ |
|
由於小弟的粗心大意損失了一個伺服機,又沒有同型號的備用,小弟機器人製作的進度要拖後了 準備這兩天再買幾個ESKY的伺服機補上~~ 另外,小弟發現ESKY伺服機在不加電的時候阻力非常小,用手輕輕的就能轉動齒輪,而我另一個輝盛牌子的伺服機阻力就非常大,幾乎轉不動~ 不知這兩種伺服機哪個比較適合用來做機器人,望各位前輩指點指點~~ |
各位好ㄚ~這幾天還在忙架設網站的事~好難阿~哈哈 雖然小弟學了幾年設計~ 謝謝前輩的建議~~ 其實是小弟我太粗心了,一次連了5個SERVO上去~忽略了其中一個,結果就崩牙了~ 真是血的教訓呀~ 下次一定要加倍小心才是~~ |
大大您好 謝謝前輩提醒~~ 小弟這顆SERVO扭力標稱值是1KG/CM 沒想到能把塑齒搞崩牙哦~  |
|
各位好ㄚ~這幾天還在忙架設網站的事~好難阿~哈哈 雖然小弟學了幾年設計~ 可是設計跟做網站又是2回事@@~努力努力~ 對了版主大大~ 其實您這次的狀況和接下來~我個人建議您還是繼續用朔膠齒得伺服機好 因為您對於機器人某些東西不太瞭解 像這次卡到如果不是因為朔膠齒 您的伺服機早冒火了 最壞的情況還會燒回控制板 也因為朔膠齒 所以您這次才只是壞了齒輪而已 機器人剛組裝完 第一次要啟動時我個人建議 一顆一顆去做 不要一次全連上一次通電啟動 這樣會有慘劇發生的 一次一顆可以注意到有沒有卡到幹麻的 安全多了 尤其是自己diy的 這更是重要 因為您可能有很多沒考慮到等等 以上都是一些經驗啦~ 大家一起加油吧~ |
|
哎呀,真是不幸耶,看來要小心操作, 設計的安全係數也要高一些~~ |
|
大大您好 其實不僅是塑齒會崩牙 金屬齒也是一樣唷~~~ 只要超過齒箱所能承受的最大負載 崩牙是很常見的~~~ 繼續加油囉~~~ 祝您順利!!! |
報告大大 正如前輩所說 是我沒設定好腳板第一顆伺服機的初始位置 那顆伺服機一直被卡住有3分鐘這樣 後來拆開來看發現兩顆齒輪都掉了很多齒 還好電子部件沒被燒壞 原來塑齒SERVO沒我想像的那麼堅固的呀!  |
|
報告大大 我想應該不是E-SKY的齒輪不行 可能是您的負載過大了~~~ 大概看了一下您是全金屬機構 但用的是塑齒的SERVO 所以動作上不能一次變化太大 不然SERVO一定會很容易壞的...... 有測過現在整體重量多少嗎? |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-8 23:31 , Processed in 0.366658 second(s), 13 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏