|
呵呵...偷偷透露一下 因為被微軟的某妹妹電話連環扣 現在只好硬著頭皮寫XP embedded的書 也會針對roboard的應用去加強喔 第三本會寫wince的書, 一樣對roboard應用進行加強說明喔 買roboard送整套書如何?! 作者親筆簽名喔, 外加有機會和依林模特兒合照... |
| 其實我也有roboard, 我想開一下討論。而且相搞個給器人專用的xpe說。 |
|
我的六足是有讓他很不順的動起來了~~但是因為要加上反運動學的演算法 所以定義了一堆 變數,然後再用ps2搖桿來遙控,所以造成程式太大放不進去的問題 看利基的討論區官方是說 128B的定義限制,想想我那2百多個變數,就算一個只佔一個byte也 就放不下了~~~~@@ 對了,另外,我看了roboard的網站,好像還是有看沒有懂,安裝系統,寫程式放進去…等等一堆 問題要問你,我再開一個話題好了~~~ |
|
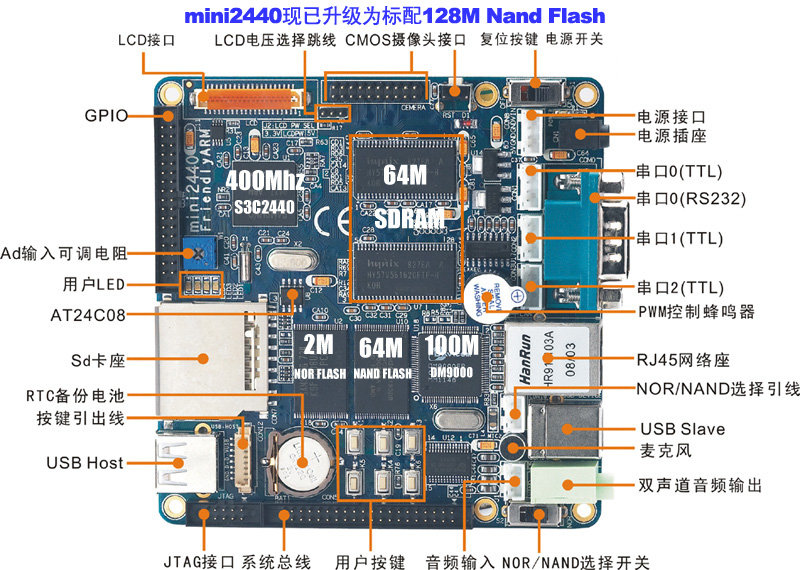
啊 原來你也有有買啊 arm的板子我家就有七片, 不包含下禮拜會寄來的我跟TIㄠ的兩片 2440我也有 主要被我拿來做行動相框和導航 作機器人真的是roboard比較適合 光他256MB的記憶體 又可以使用SD卡 自從我給錯SD卡以後我就去買了一片16GB的 大概夠紀錄一個月份的動作都可以播不重複啦 不過還是那句話,用途不一樣啦 利基的32軸主要用在機器人的"操控" EX: 結合2.4G的遙控或是ZBEE之類的 而不是讓你拚命的加動作進去喔 最近我才幫我拿到那塊利基32軸胡搞咧, 要請人弄個什麼128k的記憶體上去 ZBEE也焊上去...哈哈 等成功在來分享喔, 或是到大學的實驗室來看我胡搞也行啊 咦?! 忽然想到 您的六足現在到底是會動了沒呢?! 我本來在做小六足, 但最近被人引誘去做手掌 所以有點忘記了, 現在又想起我的小六足還沒真的完工,大六足又卡在零件買不到 啊...一堆計畫都ㄎㄟˊ住................. |
|
在此幫m大加油一下,mini2440與roborad我都有買,的確是方向不一樣 之前也有考慮用mini2440來控制我的機器人,只是像m大說的,很多東西 都要自己搞定。 話說我買的利基32軸,唉~~~~~~寫了一堆程式後才發現~~記憶體不夠大~~@@ 整個人都快風了~~~寫了快一個月的程式(利基的程式),好不容易用它的語寫出來 結果不行~~~~所以又要把我的六足改到roborad了~~~~我想記憶體一定夠大了吧~~~ |
|
至於SSC控制板或是任何其他的控制板 我自己用是都不會有不能控制或是扭力變小的情形 真的遇到應只有三個情況 1. 真的是不會用 2. 板子壞了 3. 程式有問題 |
|
怎麼搞的, 越看越像是我同學 他也是玩這種很底層的 不過他純玩OS... 和API/driver, 之前也做那種只有1MB的OS 電路和我的功力一樣,只會焊接 其實規格本來就是談出來的 業務去談都是以公司有的在談 沒有的就說服客戶變成用公司現有的 只有真的是沒辦法做到才會談如何開發的部份 說我呼風喚雨也太嚴重了, 鯨魚只會噴水 人家連兩顆小小的馬達都不賣我哩 不曉得哪裡有人願意單賣減速馬達, 我要扭力至少12公斤以上的 不然Q寶二號做不出來就糗掉了 |
|
本帖最後由 barku 於 2009-12-29 18:31 編輯 kevin6010, 前輩我不敢當, 只是 ARM 類似架構的系統玩過了幾套, 土法煉鋼自己學的. 有些經驗, 但是這些東西可玩得東西太多了. 雖然我也有玩 linux, 但是我主要都是自己寫 task scheduling 的部份, 因為 linux 對我來講太耗資源了, 或者應該是說, 我做的東西的應用都滿特殊單純的,所以不需要用到像 linux 這麼成熟的 OS. 也因為如此, 花了很多時間研究底層的控制,自己寫 driver. 假如板子有付控制喇叭的程式,可以參考他寫的方式, 雖然 喇叭用的 timer, 跑出來的 duty 可能是 50/50. 假如 該程式是使用 PWM timer 的話, 應該只要調整 暫存器設定就可以了. 不過如同 鯨魚大所說的, 他的 PWM Timer 直接控制的 pin 數不夠. 另一個方法就是要使用中斷但是, 讓這種 cpu 每 1us 中斷去控制servo 好像太浪費了. 程式有問題的話,小弟可以跟您研究一下. 假設大大想要用 linux 再加上 無線網路上網, 也許可以使用 rs232 控制伺服器控制器, 小弟之前在實驗室做的大人型機器人,都是用多塊控制板的方式. 因為各種 CPU 都有他們最適合的應用, 因此馬達控制, 影像處理, 主控制都分別在不同的架構的板子上實現的. 也因為機器人比較大, 每一個馬達控制板都只會控制他附近的幾個關節的馬達. 另外就是, 假如全部都放在同一塊板子上, 板子壞了, 機器人就掛了, 我們用多控制板的做法, 比較不會發生問題, 通常只要不是控制腳的板子壞了, 機器人也還能站著, 18# kevin6010 |
32# vegewell 沒錯,還算正常, 這樣說 ssc32 的 firmware 輸出pwm訊號部份是沒問題啦,可能只是電源的問題。 如果是 mcu 的輸出訊號不足,用提昇電阻應該可解決吧。 另外,不知板上供電給伺服機的導線粗幼會否有影響呢? 照理如果拿鐵的可以,其它板應該也可以的。 (雖然拿鐵好像是用 fpga/cpld 一類而不是用 mcu, 但應該分別不大吧) |
mzw2008: v大~~ 是哪種USB的控制板??要看說明書看是不是有這些功能或指令, 因為usb 或者rs422或者rs485......這些只是串列傳輸的介面, 有沒有附加控制複數個控制板要看板子的設計有沒有jmper或軟件的設定, ssc8就有這種功能,但是只能控制8個伺服機,所以它可以一直串到255個板子來用~~~ 一般來說,會讓每一個控制板有一個"門牌",像郵差一樣, 到了一堆住家前叫喚"幾號,有你的信", 這樣每個控制板都收到了郵差的聲音, 但只有對應"門牌"的控制板會接收並加以處理, 大致上會是這樣運作的~~~~ |
感謝 mzw2008 的解釋, 同rayrider大大說的~~ 會吃電流的是伺服機,不是控制板,控制板只提供轉譯過的pwm信號, 電池的放電能力與容量才是問題所在,受限於伺服機的額定輸入電壓, 一般都在5~6V的範圍,所以目前是用鎳氫電池串接來供電較為可行, 有玩過大腳車的就知道,那種一整串鎳氫香蕉的放電能力有多可怕~~~ ,不過也有接受高電壓的伺服機,像是KNODO的HV系列伺服機, 可用7.4v的鋰電池,因為鋰電池每個cell是3.7v,所以串兩個cell就是7.4v, 串三個cell的鋰電11.4v沒試過~~~只是鋰電池要注意充電跟放電極限, 以免放火燒山或者沒用幾次就膨起來變"麵龜"壞掉~~ 比較新的有磷酸鋰鐵電池,就比較沒有在家中放燃燒彈的危險,不過聽說放電 能力似乎沒那麼令人驚豔~~有好有壞啦~~~ 若是接太多伺服機導致控制板的pwm輸出能力若不足的話,pwm上下緣波形會變圓, 伺服機要是分辨不出這個pwm波形,就會有暴走或者不聽使喚的情形發生, 這時候可以加提升電阻,或是74LS245之類的電流buffer將波形整形成比較標準的狀態 替控制版分憂解勞一下~~~ |
|
mzw2008: 請問一台電腦是否可以同時控制三個USB傳輸規格的伺服機控制板? 電腦會自動判別嗎? 但是寫程式要如何設定? |
29# irobot ..........你意思是如果只試接一兩顆伺服機控制便沒有問題嗎? 沒錯,還算正常, 應該接十幾顆小的伺服機,都不會有問題, |
|
本帖最後由 vegewell 於 2009-12-29 14:42 編輯 28# rayrider ....ssc32的firmware 版本,看看小的可不可以幫到忙,因為小的用藍芽遙控ssc32時,是包率是115.2k每秒,而且1/50秒動作更一次, 謝謝你的熱心, 我的firmware 版本是 SSC32-V2.01XE, 中間的2顆jumper也還在, 不好意思,我沒說清楚,我是裝置使用GWS 大型伺服機(S666NF/2BB S688-2BB/MG S689-2BB/MG)共八個, 加上 盛輝MG-946金屬伺服器, 十五個, 總共 23 個(前陣子加上九個小的擠滿 32軸), 可能都使用扭力大的伺服機,造成電流不夠,才有這種現象, 可是我有使用拿鐵盒子十軸伺服機控制器,驅動大的伺服機,效果好得多了(可惜他們公司倒了買不到了), 所以,板子是有好壞之分, .....你說的情況是有些網友去用一個電話用的(0.5~2A)充電變壓器去驅動一個或多個伺服機就會發生以上你說的, 我使用的電源供應器 是明緯企業股份有限公司的, http://www.meanwell.com.tw/search/se-600/default.htm http://www.meanwell.com.tw/search/s-150/default.htm 我覺得我的se-600有點問題, 因為各自供應一邊電力時(jumper調整),沒什麼力氣, 反倒連合起來供電,才比較有力, |
請問這塊ARM9 開發板是否可以控制伺服機? 要推 20吋 LCD 你是要接 啥介面的 要接一般 20 吋 LCD 應該都是走 VGA port 如果 arm 有 支持 VGA port 理論值是可以 小尺寸的 我的瞭解 都是走 TTL 直接輸出 大尺寸都是 LVDS 居多 板上還有 LVDS output 還要加 invertor 才能推得動 |
我現在有官方的ssc32控制板, vegewell 大大, ssc32 原來會有這種問題嗎? 很感興趣啊!! 你意思是如果只試接一兩顆伺服機控制便沒有問題嗎? |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-9 02:33 , Processed in 0.224497 second(s), 12 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏