| 謝謝vegewell 我再來瞭解看看.. |
|
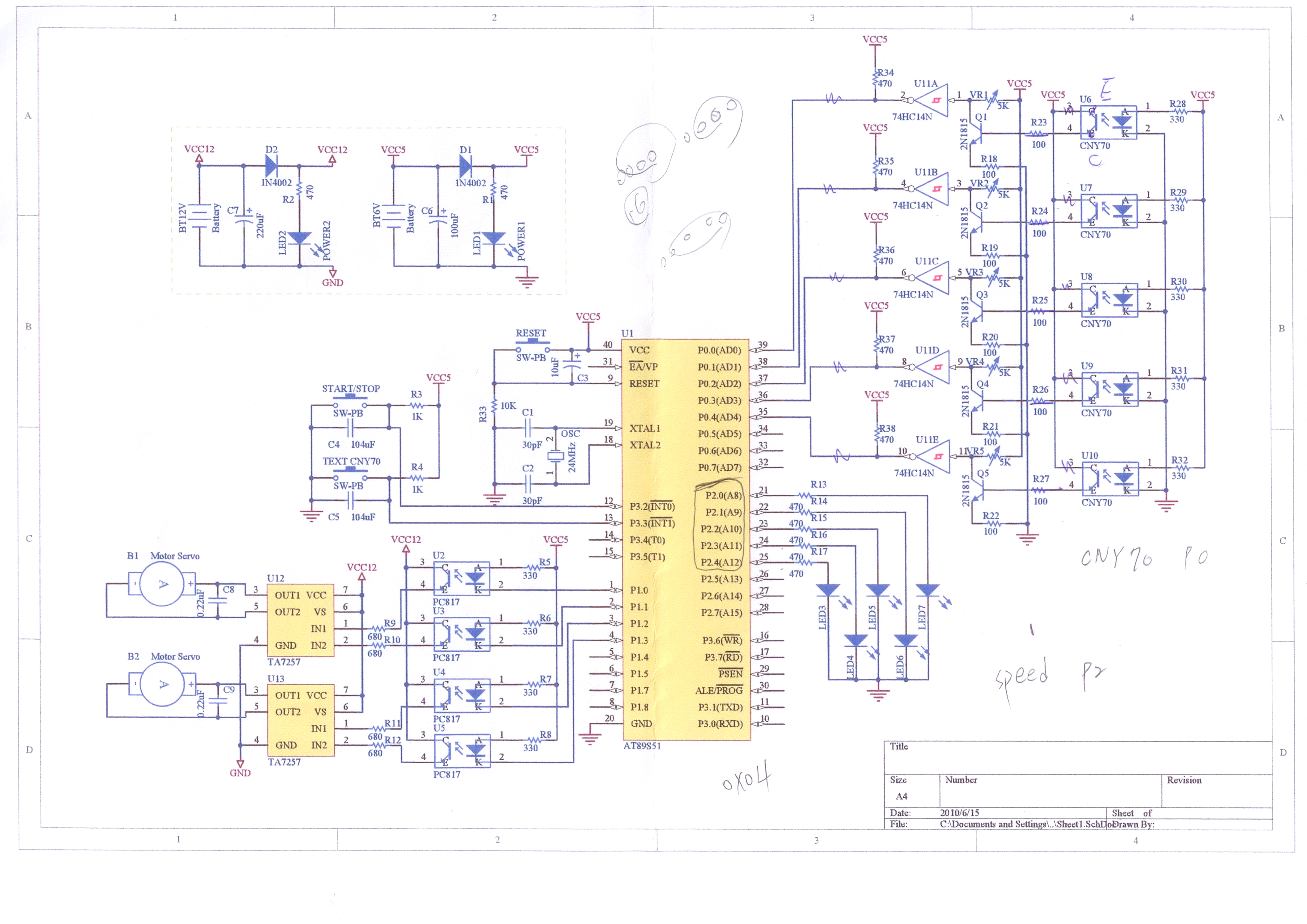
本帖最後由 vegewell 於 2010-6-21 19:04 編輯 - 82 - case 6://終點 ab_direction=5; break; default: ; } } void modulate(){ bit modulation=0; unsigned char i=0,j=0; modulateStart: while (stack!=5&&i<top){ while (stack==6&&i<top){ i++; } j=i+1; while (stack[j]==6&&j<top){ j++; } if (stack==1&&stack[j]==3){ stack=6; stack[j]=6; modulation=1; i++; } else if (stack==3&&stack[j]==1){ stack=6; stack[j]=6; modulation=1; i++; } else if (stack==2&&stack[j]==4){ stack=6; stack[j]=6; - 83 - modulation=1; i++; } else if (stack==4&&stack[j]==2){ stack=6; stack[j]=6; modulation=1; i++; } else { i++; while (stack==6&&i<top){ i++; } } } if (modulation==1){ i=0; j=0; modulation=0; goto modulateStart; } else { // goto mainState3; } } void algorithm(){ unsigned char temp=0; unsigned char i=0; //---------------------------------- modulate();//先處理陣列的值得到最快路徑 i=0; do{ P2=~0x00; delayX10ms(10); P2=~((i&0x0f)|(stack<<4)); - 84 - if (i>=top){ i=0; }else { i++; } delayX10ms(250); P3=0xff; temp=P3; temp=~temp; }while(temp!=0x01); //-------search initial-------------- mouseState=0; GOTOEND=0; correct=0; ab_direction=1; top2=0;//指到目前的陣列 //----------------------------------- while (GOTOEND==0){ if(mouseState==1){ temp=sensor(); if (temp!=0){ algorithm_action(temp); }else {} correct_straight(); } else if(mouseState==0){ step=10; mouseState=1; straight(); }else {} delayX10ms(1); } } char sensor(){ - 85 - unsigned char temp; P0=0xff; temp=P0&0x7F; //把P0.7 去掉 if (temp==0x22|| //直線 temp==0x66||temp==0x44||temp==0x4C|| temp==0x33||temp==0x15||temp==0x1F){ return 1; } else if(temp==0x2A|| temp==0x7E||temp==0x54||temp==0x7C|| temp==0x3F||temp==0x15||temp==0x1F){ //牆 return 2; } else if(temp==0x00){ //T or 十字 return 3; } else if(temp==0x02|| temp==0x04||temp==0x60||temp==0x07|| temp==0x03||temp==0x01){ //右T->左T return 4; } else if(temp==0x20|| temp==0x10||temp==0x18||temp==0x30|| //去掉 temp==0x30 0x20 temp==0x60||temp==0x40){ //左T->右T return 5; } else if(temp==0x1C|| temp==0x1E||temp==0x0E||//temp==0x0F||temp==07|| temp==0x3C||temp==0x38){//temp==0x78||temp==70){ //終點 return 6; } else if(temp==0x63|| temp==0x67||temp==0x47||temp==0x4F|| temp==0x73||temp==0x71||temp==0x79){ //最兩邊感應到 return 7; - 86 - } else{ //nothing return 0; } } void correct_straight(void){ unsigned char right=5; unsigned char left=5; unsigned char temp; P0=0xff; temp=P0&0x7F; //把P0.7 去掉 if (temp==0x4C){ correct=1; //禁止計時中斷影響 delayX10ms(10); P1_0=1; P1_1=0; //左馬達停一下讓右馬 達轉回 delayX10ms(left); P1_1=1; delayX10ms(10); correct=0; } else if(temp==0x44){ correct=1; //禁止計時中斷影響 delayX10ms(10); P1_0=1; P1_1=0; //左馬達停一下讓右馬 達轉回 delayX10ms(left-2); P1_1=1; delayX10ms(10); correct=0; } else if(temp==0x66){ correct=1; //禁止計時中斷影響 delayX10ms(10); - 87 - P1_0=1; P1_1=0; //左馬達停一下讓右馬 達轉回 delayX10ms(left-3); P1_1=1; delayX10ms(10); correct=0; } else if(temp==0x19){ correct=1; delayX10ms(10); P1_1=1; P1_0=0; delayX10ms(right); P1_0=1; delayX10ms(10); correct=0; } else if(temp==0x11){ correct=1; delayX10ms(10); P1_1=1; P1_0=0; delayX10ms(right-2); P1_0=1; delayX10ms(10); correct=0; } else if(temp==0x33){ correct=1; delayX10ms(10); P1_1=1; P1_0=0; delayX10ms(right-3); P1_0=1; delayX10ms(10); correct=0; - 88 - } else { //return 0; } } void correct_turn(void){ unsigned char right=10; unsigned char left=10; unsigned char temp; unsigned char temp2=0; bit turn=0; //0->先右轉..1->左轉 correct=1; correct_start: P0=0xff; temp=P0&0x7F;//把P0.7 去掉 switch (temp){ case 0x08: //0001000 往前走一點點再測試一次 case 0x18: case 0x0C: delayX10ms(100); P1_0=0; P1_1=0; delayX10ms(1); P1_0=1; P1_1=1; delayX10ms(100); goto correct_start; break; case 0x00: while(temp==0x00){ if (turn==0){ delayX10ms(100); P1_1=1; P1_0=0; delayX10ms(left); - 89 - P1_0=1; delayX10ms(100); if (temp2++>4){ turn=1; temp2=0; } } else { delayX10ms(100); P1_0=1; P1_1=0; delayX10ms(left); P1_1=1; delayX10ms(100); if (temp2++>4){ beep(); } } delayX10ms(1); P0=0xff; temp=P0&0x7F; } // beep(); goto correct_start; break; case 0x10: //偏右part1 case 0x30: delayX10ms(100); P1_0=1; P1_1=0; //左馬達停一下讓右馬達轉回 delayX10ms(left); P1_1=1; delayX10ms(100); break; case 0x20: //偏右part2 case 0x60: - 90 - case 0x40: delayX10ms(100); P1_0=1; P1_1=0; //左馬達停一下讓右馬達轉回 delayX10ms(left+5); P1_1=1; delayX10ms(100); break; case 0x04: //偏左part1 case 0x06: delayX10ms(100); P1_1=1; P1_0=0; delayX10ms(right); P1_0=1; delayX10ms(100); break; case 0x02: //偏右part2 case 0x03: case 0x01: delayX10ms(100); P1_1=1; P1_0=0; delayX10ms(right+5); P1_0=1; delayX10ms(100); break; default: ; } correct=0; } void beep(){ P1_7=0; time0_temp=19; while(time0_temp!=0){} - 91 - P1_7=1; time0_temp=19; while(time0_temp!=0){} } void straight(){ P1_0=1; P1_1=1; time1_temp=littleStep; countStep=0; } void turnleft(){ P1_0=1; P1_1=1; delayX10ms(100); //靜止一下在動 time1_temp=r; P1_1=0; //右馬達轉 while(time1_temp!=0){} P1_1=1; P1_0=1; delayX10ms(100); //靜止一下在動 mouseState=0; //動作完畢 } void turnright(){ P1_0=1; P1_1=1; delayX10ms(100); //靜止一下在動 time1_temp=r; P1_0=0; //右馬達轉 while(time1_temp!=0){} P1_0=1; - 92 - P1_1=1; delayX10ms(100); //靜止一下在動 mouseState=0; //動作完畢 } void goback(){ unsigned char temp1=r*3+10; //270 度 // unsigned char temp2=r*2; //180 度 //-------------------------------------------- P1_0=1; P1_1=1; delayX10ms(100); //靜止一下在動 time1_temp=temp1; //左270 度 P1_0=0; while(time1_temp!=0){} //------------------------------------------- P1_0=1; P1_1=1; delayX10ms(100); //靜止一下在動 time1_temp=r; //左邊90 度 P1_1=0; while(time1_temp!=0){} //-------------------------------------------- P1_1=1; P1_0=1; delayX10ms(100); //動作完畢 mouseState=0; } void push(unsigned char temp){ stack[top]=temp; if (top>=maxStack){ beep(); } else { - 93 - top++; } } void time_init(void){ time0_temp=0; time1_temp=0; PT0=1; //TIME0 高優先 PT1=0; //TIME1 低優先 EA=1; //所有中斷自己搞 TMOD=0x12; //TIME0->MODE2,TIME1->MOD1 TH0=0x9C; //0.1MS/1US=100->256-100=156=9C TL0=0x9C; ET0=1; //TIME0 中斷啟動 TR0=1; //TIME0 啟動 TH1=0x3C; //50MS/1US=50000->65536-50000=15536=3CB0H TL1=0xB0; ET1=1; //TIME1 中斷啟動 TR1=1; //TIME1 啟動 } void delayX5ms(unsigned char temp){ int i,j; for (i=0;i<temp;i++){ for(j=0;j<600;j++){ ; } } } void delayX1ms(unsigned char temp){ int i,j; for (i=0;i<temp;i++){ for(j=0;j<120;j++){ ; - 94 - } } } void delayX10ms(unsigned char temp){ int i,j; for (i=0;i<temp;i++){ for(j=0;j<1200;j++){ ; } } } void delay2X10ms(unsigned char temp){ int i,j; for (i=0;i<temp;i++){ for(j=0;j<1200;j++){ ; } } } void time0_vector(void) interrupt 1{ //TIME0 0.1Ms 中斷一次 if (time0_temp>0){ time0_temp--; } } void time1_vector(void) interrupt 3{ //TIME1 50Ms 中斷一次 if(time1_temp>0){ time1_temp--; } else if (time1_temp==0){ if (mouseState==1&&correct==0){ if(countStep<step){ countStep++; time1_temp=littleStep; P1_0=0; - 95 - P1_1=0; delay2X10ms(1); P1_0=1; P1_1=1; delay2X10ms(10); } else if(countStep>=step){ mouseState=0; P1_0=1; P1_1=1; } else {} } else {} } else {} TMOD=0x12; //TIME0->MODE2,TIME1->MOD1 TH1=0x3C; //50MS/1US=50000->65536-50000=15536=3CB0H TL0=0x9C; } ======================== 以上適用 三顆CNY70 ic -->89C51 |
|
//9212011 感應器的值要反轉..終點的表示法要變動.. //9212031 將mouseState 改為mouseState..加入ab_direction..開始做search.. //9212051 將陣列值反映到led 上..微調for 電池..top[0]當陣列第一個 // 當最兩邊感應到時..往前走..直到空白或終點為止 // 轉彎修正18 0c 會重複到..也要當往前走 #include <AT89X51.H> //----------全域變數----------- unsigned char time0_temp=0; unsigned char time1_temp=0; unsigned char mainState=0; //功能鍵 unsigned char mouseState=0; //電腦鼠的狀態 unsigned char ab_direction=1; //絕對方向 bit correct=0; //禁止中斷影響 //bit norepeat=0; //用在左T..讓他不要重複存值 bit GOTOEND=0; //走到終點 unsigned char r=20; //轉90 度所需要的時間25->22->20->15 unsigned char step=0; //走幾格 unsigned char littleStep=1; //走一小步 unsigned char countStep=0; //4in1 記步器 unsigned char maxStack=30; unsigned char stack[30]={0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}; //stack[0]不用 unsigned char top=0; //top=0 當作pop 底 unsigned char top2=0; //-----------函數宣告---------- void time_init(void); void delayX1ms(unsigned char); void delayX5ms(unsigned char); - 72 - void delayX10ms(unsigned char); void delay2X10ms(unsigned char); void beep(void); void push(unsigned char); //char pop(void); void adjust_direction(unsigned char t); void modulate(void); void algorithm(void); char sensor(void); void algorithm_action(unsigned char t); void action(unsigned char t); void correct_straight(void); void correct_turn(void); void straight(void); void turnleft(void); void turnright(void); void goback(void); //----------------------------- void main(){ //-----------宣告區------------- unsigned char temp=0; unsigned char temp2=0; unsigned char i=0; bit temp_bit=0; //-----------初始化區----------- time_init(); //------------------------------- while(mainState==0){ P3=0xff; temp=P3; temp=~temp; - 73 - if (temp==0x01){ //test1 感應器輸出到led mainState=1; } else if (temp==0x02){ //test2 動作測試 mainState=2; } else if(temp==0x04){ //test3 地形偵測 mainState=3; } else if(temp==0x08){ //test4 地形判斷 mainState=4; } else if(temp==0x10){ //test5 連續地形判斷 mainState=5; } else if(temp==0x20){ mainState=6; //test6 邊走邊修正+連續地形判斷 } else if(temp==0x40){ mainState=7; //test7 搜尋 } else if(temp==0x80){ mainState=8; //test8 } else{} } //------------test1----------------- while(mainState==1){ P2=P0; } //------------test2----------------- while(mainState==2){ P3=0xff; temp=P3; temp=~temp; if (mouseState!=0){ //有動作正在進行中 continue; - 74 - } switch(temp){ case 0x01: //直走一格 mouseState=1; straight(); break; case 0x02: //左轉 mouseState=2; turnleft(); break; case 0x04: //右轉 mouseState=3; turnright(); break; case 0x08: //迴轉 mouseState=4; goback(); break; default:; } } //------------test3----------------- while(mainState==3){ } //------------test4----------------- while(mainState==4){ } //------------test5----------------- while(mainState==5){ } //------------test6----------------- while(mainState==6){ } //-------------test7---------------- while(mainState==7){ P3=0xff; temp=P3; - 75 - temp=~temp; if (temp==0x01){ while (GOTOEND==0){ if(mouseState==1){ temp2=sensor(); if (temp2!=0){ action(temp2); }else {} correct_straight(); }else if(mouseState==0){ step=10; mouseState=1; straight(); }else {} delayX10ms(1); P2=~((top&0x0f)|(stack[top-1]<<4)); } i=0; do{ P2=~0x00; delayX10ms(10); P2=~((i&0x0f)|(stack[i]<<4)); if (i>=top){ i=0; }else { i++; } delayX10ms(250); P3=0xff; temp=P3; temp=~temp; }while(temp!=0x02); beep(); beep(); beep(); - 76 - algorithm(); } else {} } //-------------test8------------------- while(mainState==8){ } //---------------------------------------- } void algorithm_action(unsigned char t){ // P2=~0x00; // delayX10ms(10); while(stack[top2]==6){ top2++; } P2=~stack[top2]; if(t==3||t==4||t==5){ switch(stack[top2]){ case 1: if (ab_direction==4){//right mouseState=3; turnright(); correct_turn(); ab_direction++; } else if(ab_direction==2){//left mouseState=2; turnleft(); correct_turn(); ab_direction--; } else { } break; case 2: if (ab_direction==1){//right - 77 - mouseState=3; turnright(); correct_turn(); ab_direction++; } else if(ab_direction==3){//left mouseState=2; turnleft(); correct_turn(); ab_direction--; } else { } break; case 3: if (ab_direction==2){//right mouseState=3; turnright(); correct_turn(); ab_direction++; } else if(ab_direction==4){//left mouseState=2; turnleft(); correct_turn(); ab_direction--; } else { } break; case 4: if (ab_direction==1){//left mouseState=2; turnleft(); correct_turn(); ab_direction--; } - 78 - else if(ab_direction==3){//right mouseState=3; turnright(); correct_turn(); ab_direction++; } else { } break; default: ; } top2++; if (ab_direction==0){ ab_direction=4; } else if(ab_direction==5){ ab_direction=1; } else{ } } else if(t==6){ GOTOEND=1; mouseState=0; P1_0=1; P1_1=1; } else{ } } void action(unsigned char t){ unsigned char temp; switch (t){ case 1://直線 break; case 2://牆 - 79 - mouseState=4; goback(); correct_turn(); adjust_direction(2); push(ab_direction); break; case 3://T mouseState=3; turnright(); correct_turn(); adjust_direction(3); push(ab_direction); break; case 4://左T adjust_direction(4); push(ab_direction); while ((temp = sensor())!=1){ if(mouseState==0){ step=10; mouseState=1; straight(); } } break; case 5://右T mouseState=3; turnright(); correct_turn(); adjust_direction(5); push(ab_direction); break; case 6://終點 break; case 7://最兩邊感應到 correct=1; P1_0=0; P1_1=0; - 80 - delayX10ms(2); P1_0=1; P1_1=1; correct=0; if ((temp = sensor())==4){ goto action_7; } temp = sensor(); while(!(temp==3||temp==6)){//直到T 或終點..才會繼續感應下一個值 if(mouseState==0){ step=10; mouseState=1; straight(); } temp = sensor(); } if (temp==6){ GOTOEND=1; mouseState=0; P1_0=1; P1_1=1; adjust_direction(6); push(ab_direction); } action_7: break; default: beep(); } } void adjust_direction(unsigned char t){ switch (t){ case 1: break; case 2://牆 if (ab_direction==1){ - 81 - ab_direction=3; } else if (ab_direction==2){ ab_direction=4; } else if (ab_direction==3){ ab_direction=1; } else if (ab_direction==4){ ab_direction=2; } else { beep(); } break; case 3://T ab_direction++; if (ab_direction==0){ ab_direction=4; } else if(ab_direction==5){ ab_direction=1; } else {} break; case 4://左T break; case 5://右T ab_direction++; if (ab_direction==0){ ab_direction=4; } else if(ab_direction==5){ ab_direction=1; } else {} break; |
|
case 就是 狀態機的用法,在作業系統的書籍裡面都有 如果要即時性的話, 用中斷會比較好 中斷要注意別卡在中斷裡 出不來,互等資源是最常發生的問題喔~ |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-9 05:02 , Processed in 0.189178 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏