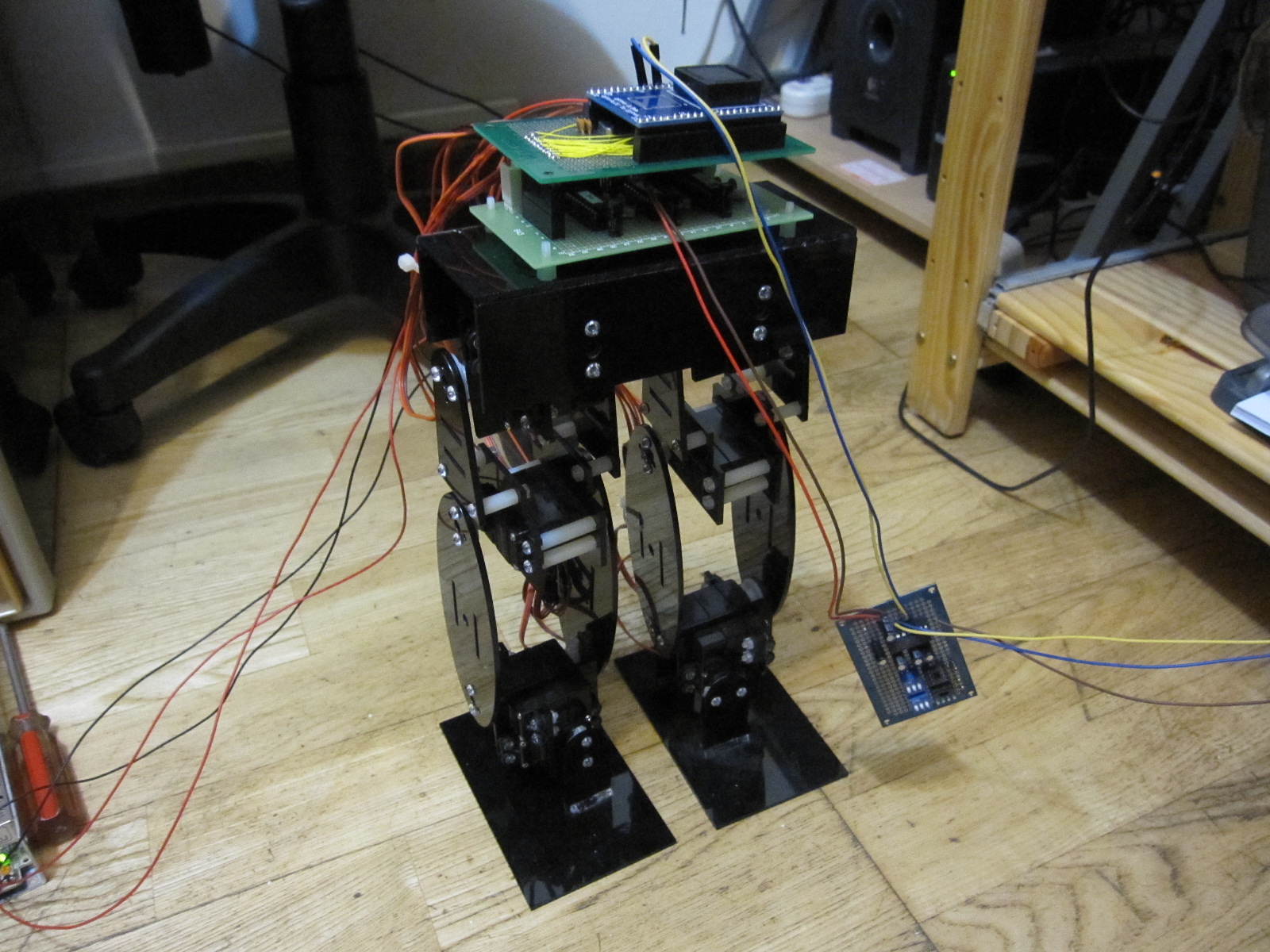
| 飆大,如果有影片可否分享一下,我後來發現用51控制不是是很理想,會有Timing的問題,比如我要讓2顆SERVO同時運動要同時變更資料但是實際上會有時間差,我想應該是我設計控制板的問題,在來就是機構的問題,當初做腰部的那2個前後壓克力板,忘記要打洞而且寬度也設計錯誤,導致大腿的部份不能左右開很大的角度,在來就是小腿設計太高導致整個重心提高很多,所以向側邊偏移的角度太大就會側倒,這星期已經摔斷2個部位了(還好友壓克力膠可以黏回去@@),我在想看看有沒有其他方法可以走,這次做完雖然有點經驗了,覺得還是弄個套件先來玩比較好,有沒有大大願意介紹一個基礎的可以用C寫的控制板 |
| 我們有一些運動範例, 不過, 都是要根據設計機器人的重心來作微調, 一個動作慢慢刻, 是有必要的。 |
|
如果用公式計算的話,可以參考反運動學,但也是要先有參考位置,才能用公式算出馬達位置, 通常參考位置就是仿造人的運動角度吧 另一個更利害的叫做 zero dynamic...什麼的, 那只要用一個參數就可以計算出全部的設定, 小弟才疏學淺,還是搞不懂裡面的計算細節, 但是只要能做到摩擦力,重量,長度都與理論相同的話, 這個理論是很厲害的... 像之前提的,一個個調整是最快, 最簡單的方法了 |
| 感謝前輩的回覆,我當初想說有沒有公式之類的東西,可以讓晶片去計算要走多大步,然後晶片自己計算各SERVO所需要轉的角度就好,看樣子是我想太多,目前就先一個慢慢調,把數值記錄下來,在讓他跑 |
|
少了上半身的重量 反而更容易行走 連爬樓梯及跳耀都變得更容易達成 其實只要簡單的幾個POS循環即可 |
|
我過去經驗 說說參考就好 只有下半身的機器人要做到自主的行走有困難 因為重心轉移到一支腳上的時候, 沒有上半身壓著,是沒法抬腳的... 所以會需要上半身的重量幫助重心轉移, 至於方法很多種, 用吊著先寫入基本動作也可以 然後接著放在地上調整細節, 最後調整速度 這樣適應性比較差,但這是很快的方法喔... |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-9 03:49 , Processed in 0.270760 second(s), 13 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏