|
喔喔,感謝r大!!! 或許可以先講簡單一點的,由淺入深,我自己也想找時間KK機器人學好了^^ ps.好像要回復在"機器人電池計算機"這個主題下...不過沒關西,意思到了:) |
| 謝謝 S大的支持,最近忙著用遊戲引擎開發新一代的6足介面,開於IK方面的理論我會用小弟的六足來作說明,先不會講到4DOF以上,因為只要牽涉到複雜的數學公式,沒有人會愛聽的。 |
|
rayrider大: 我看你能做到這麼好的零件, 算是花很多心力,有很大的突破. 我也有想做的零件, 以後有需要再請教你, 我這裡有另一種伺服機的組合, 一片板子加上四隻2.6mm寬4~5公分長折彎的螺絲, 可不可行沒試過,給六足機器人做者,謹供參考. 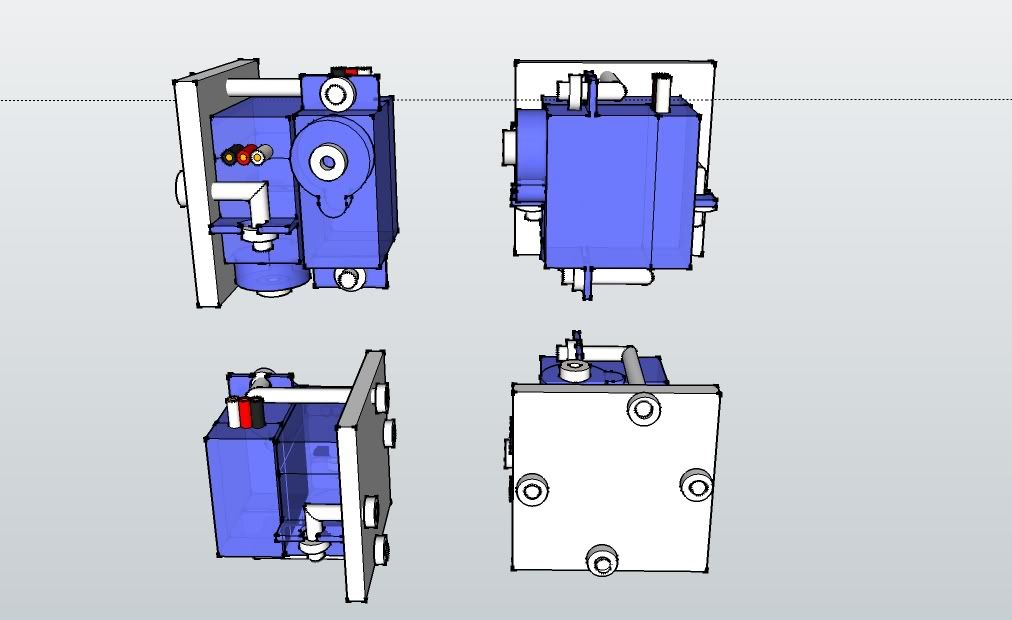 |
|
!!!!! 這種圖是用什麼畫的呢 一直好想學3D製圖 但是一直卡在那邊 這組圖片真的很棒喔, 立刻設為桌面XDD |
|
本帖最後由 rayrider 於 2010-11-14 16:46 編輯 這個是好問題,我想m大已經到很後期了。我可以介紹你這樣接,比較不挑伺服機,材是要用較硬的, 不能用abs及壓克力,最好是鋁合金及纖維板。    沒錯用遙控器搖桿來操控的方式比較有趣,我已經寫了一部份了,可是最近沒有時間。如果有時間的話,我還是以寫下去的,包括iphone ipod ipad 的控制。再說明一點,我的機器人是只有神經沒有大腦的,大腦在電腦中,所以控制可以很有彈性。 |
| 可以一試啊,最近在blog 有開始整理一下資料歡迎有空去看一下。 |
| ^^老實說,程式方面我是門外漢,所以ㄚ....到時還希望您鼎力相助啦^^ |
|
剛剛看了你之前的影片......超正的啦^^ 其實我只是愛做機構,至於如何讓它動....@@ 目前還在摸索中@@ 日前去了世貿看展覽,回來後又重燃烈火, 目前正製作六足中,如果完工後.... 希望有機會能請你讓它動一動^^ 這是我的參考體 http://www.youtube.com/watch?v=6tR0TDsWCls&feature=related 可是我的是小一號的^^ 24顆伺服,用利基的板子,不知能否做到像你那樣的動作^^ |
| 各位大大過獎了,小弟因為小時侯看太多鋼彈所以中毒太深,作這些只是為了一解毒癮,沒有什麼特別用意。 |
|
台灣就是需要大大這種人來激勵!! 太佩服了~有機會一定要跟大大多討教討教~ |
|
哇!!!<----我只想的到講這個 受教了 光是看到還為了精準去量每個伺服機的差異 真是只能"哇"...... 這就像日本電視冠軍節目裡面那種達人 為了追求事物的完美, 每個小細節都去要求到d^__^b |
| 你....真的玩很大^^我只用過精選電池跟馬達(因為比賽需要),沒想到....還有精選伺服機,優!!!! |
|
本帖最後由 rayrider 於 2010-10-28 17:33 編輯 回復 16# mzw2008 小弟為什麼不用那種幾十元的塑膠齒是有理由的,不只是為了摸得到的『品質』,而是為了那看不見的操控品質。因為小弟作的機器人的控製不是靠『動作記錄方式』(motion recording--即把機器人擺個pose然後把伺服機的位置記下來的方法,不好意思我真的不知這種操作控制方式叫什麼所以自已亂取一個名子)控制的。 我的機器人動作是靠『反向運動』公式計算出來,這兩種不同的控制方法,對伺服機控制的要求完全不一樣, --用『動作記錄方式』控制的伺服機,只要pose可以擺出來,管他伺服機的脈長是多少,只管記下來就是了。所以VR準不準沒有差。 --但是靠『反向運動』公式計算把pose算出來的再控制伺服機,那伺服機就一定要很準,不然走起來會走得不自然會一跛一跛的,要伺服機準,VR一定要準,除了VR要準,還是每個伺服機的脈長/行程比都要一致。 在這裡跟各位大大說一個我不曾說過的作六足機器人技巧好了,如果要用類比伺服機在裝機前一定要一個一個去測行程,為了測行程我還設計了一個可以量出1/50度的伺服機行程計,最後還要再用列表配對每個伺服機的脈長/行程比,小弟上次作的ALPHA 就用了40個伺服機來配對。所以為什麼我要用數位鋼齒伺服機,優點我就不說了。 |
|
會這樣問就是因為以我所知, SERVO用上鋼材都會"很貴" 因為鋼很硬 , 所以很耐用 但相對加工難度就高且貴@@ 為何不考慮原來那種幾十元的塑膠齒就好呢? 還是這純粹作品質的 就像有某玩家要我整套樂高改鋁合金一樣XDD |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-28 09:49 , Processed in 0.597597 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.


 分享
分享 收藏
收藏