|
回復 26# avkeith 機器人會看電視. 通常是內裝有高等人工智慧的智能機器人, 這種智能機器人所注重的是在身體及環境週遭所累積記取的各項變動參數. 這和單單從網路得到的檔案不太相同. 將來的電視是高畫質3D電視,能建構類似實境的感受, 可以讓機器人得到實際教導的經驗值. 而且是互動的, 例如:電視上會秀出一包麵粉, 然後會打出一行字:what is it? 機器人要會回答:麵粉. 又例如:電視上會秀出一盤菜, 然後會打出一行字:need how many salt? 機器人要會回答:要放入一公克鹽巴. 如果回答不出來或回答錯誤,就表示機器人有問題, 需要進行調整或維修. 基本上,機器人看電視,是不需要和輪車分離的. 站著看即可, 會抱機器人去沙發看電視,通常是主人自己想看電視, 然後需要有個伴坐在旁邊,陪著看. 智能機器人看一般節目,會產生什麼影響? 則是屬於難以得知領域. |
|
回復 25# lucrece_lu 節目應該是 [機器人大主廚] 沒有錯. 我們這款機器人.會受到大眾的歡迎. 最重要的原因便是.它很會做各種好吃的美食. 任何煎煮炒炸的餐類及湯飲.包括各地方小吃及各式甜點飲料.都做得出來. 而且啊!最重要的一點,機器人是絕對有耐心的. 只要有材料, 主人什麼時候,想吃什麼,都沒有問題. 機器人的廚房也與一般廚房不同,冰箱也不一樣. 廚房的擺設有其方便性的規格, 包括任何材料的擺放及規定, 例如鹽, 一般是裝在罐子裡, 而機器人是把它每一公克一小格子的放置法. 其他的節目 如 [學習照顧家人]. 內容是教導機器人,如何協助照護老人家或生病的家人或小孩子等.. 又有節目是 [家裡大小事]. 內容是教導機器人,如何應付家裡日常生活中,會及可能會發生的事, 當然包括清潔打掃洗衣..等必定做的事. |
|
抱機器人去沙發看電視 .... 實在是太偉大的發明了 ! 但我有一個疑問 , 可能是我太老了 , 這種青春的思考方法學習不了 , 思想太前衛了 , 為何機器人要看電視呢 ? 有可這樣座在沙發上的大型機器人 , 在身體內安裝上網的裝置不太難吧 , 為何十多分鐘能下載完成的節目 , 偏要機器人座著看一小時呢 ? 再說機器人的本意是為人類工作的機器吧 , 為何機械人要有娛樂呢 ? 即使要在電視上學習人類的生活方式 , 也不必要看電視吧 ? 下載->存檔->分析->取檔 便可以了吧 ? 不過思考是好事 , 繼續努力吧。 |
|
呵呵 抱機器人去沙發看電視.. 這個主意真是不錯呀 那 什麼 節目 適合機器人看呢 是 G or PG13 or R or NC17 ....... 還是有專門給機器人看的節目 like 機器人那麼大 機器人大三通 還是 機器人大主廚 |
如果這樣的話,那要腳幹嘛?? 改用輪型 如何可以擺多種pose;  |
|
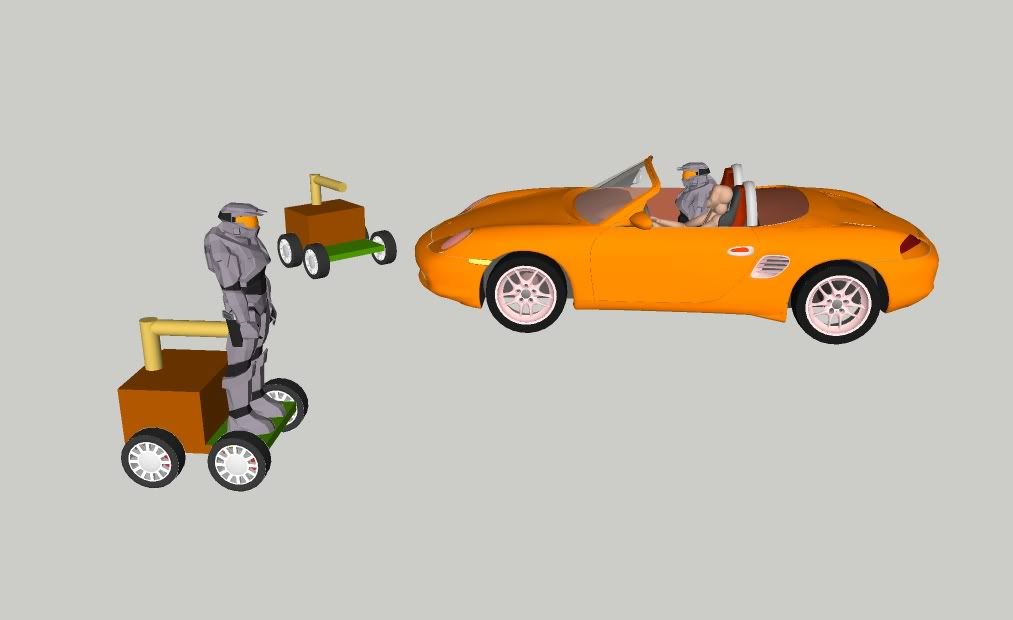
要讓機器人跟輪車分離, 後面先裝上板子, 讓機器人跟板子一起放平, 再鬆開腳髖骨及膝蓋的電動卡筍,讓腳能彎曲 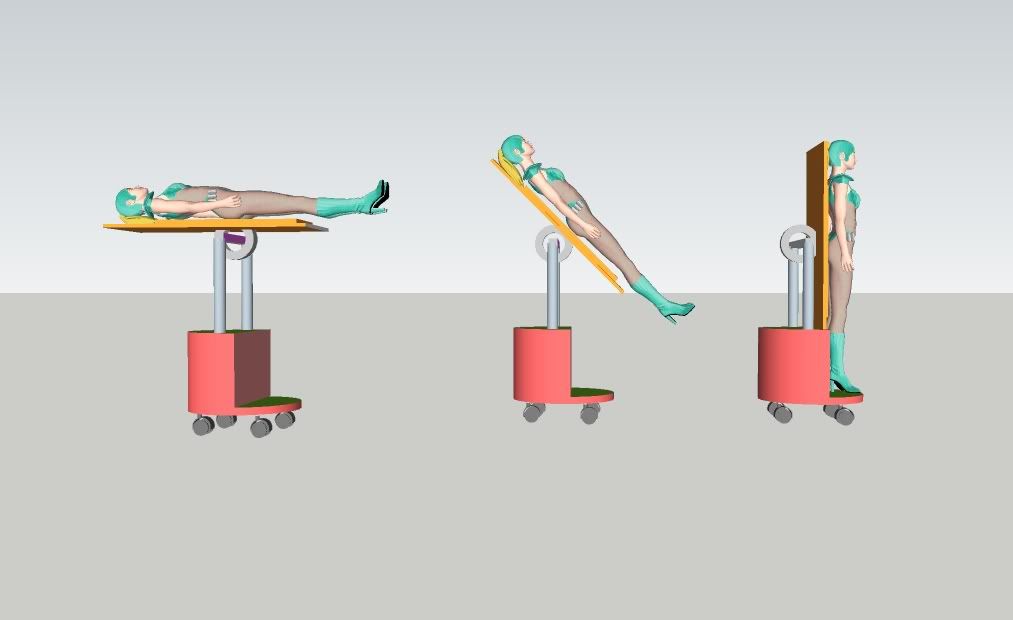 再抱去讓機器人看電視: 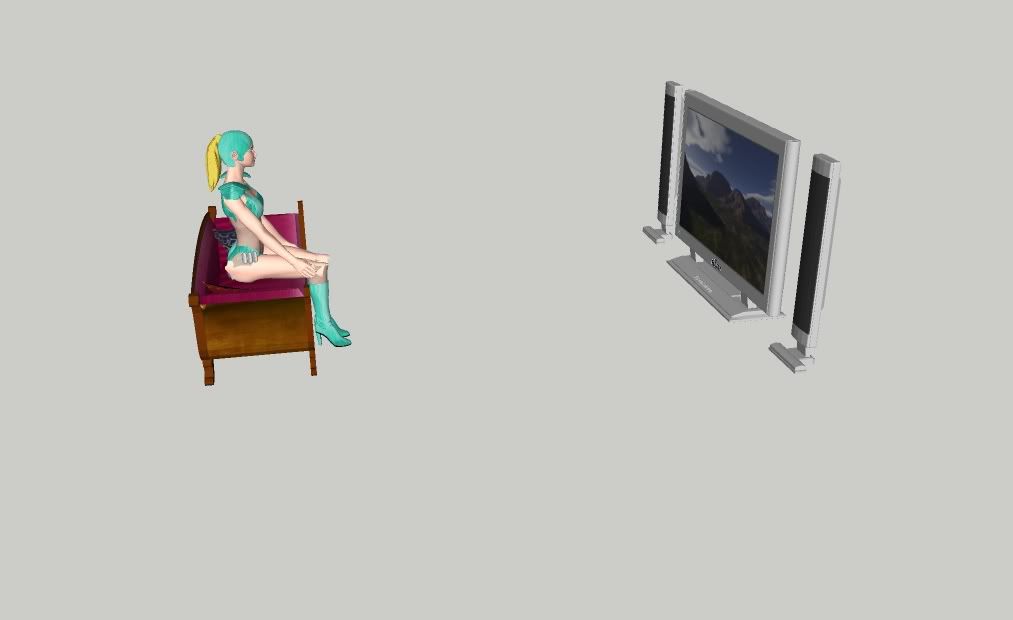 做得好就可以多做一個:  |
|
當然,剛開始難以做到這麼漂亮, 可以做到內部骨架 (將來應該有專門為機器人裝皮的公司), 該有的功能皆俱全, 手的動作很靈活,會拿東西, 臉部有表情,會說話, 另外加裝動力方向輪,原地旋轉一圈,只需兩秒, 設計得好,會彎腰/鞠躬.因背部有架子支撐. 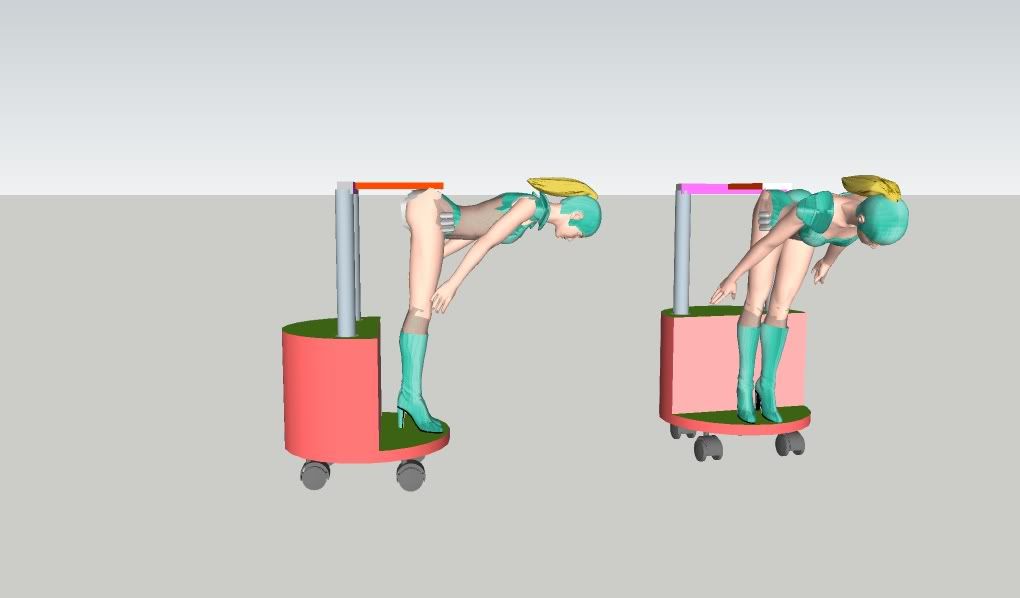 |
|
回復 20# avkeith 說得有點對, 倒底誰是主人?誰是機器人? 是哪個傢伙這麼顛顛?做這麼好笑的設計. 話說回來,我貼了不適合的角色, 讓人覺得怪怪. 基本上,會在家裡做家事的機器人, 它外形可不是彪熯的戰鬥形機器人, 你想想看,有什麼機器腿,因為不必裝大馬達,所以可以做成修長的美腿. 如下圖: 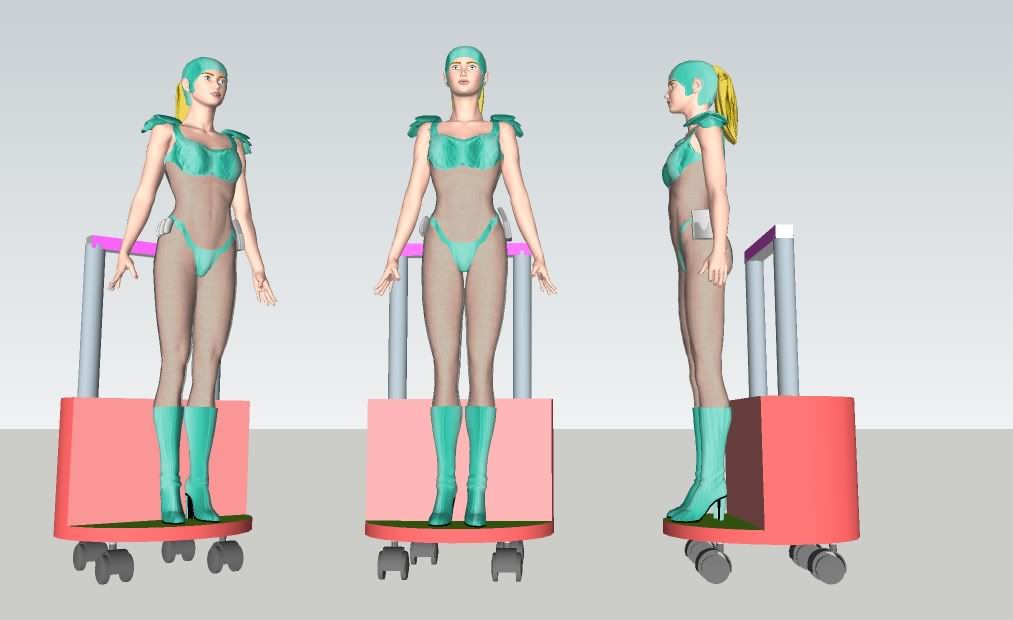 --------------------------------------------- ---------------------------------------------http://i736.photobucket.com/albums/xx5/vegewell/robot-girl2.jpg --------------------------------------------- http://i736.photobucket.com/albums/xx5/vegewell/robot-girl3.jpg |
|
有腳不能動 ... 有輪不能座車 , 還要把機械人抱上車 ? 那那一個才是主人 ? 那個才是機械人 ? 有這種做機械人後把它變主人 , 自己變機械人的嗎 ? 看來 ... 賣擱背看了這設計也要覺得騖嘆這世上有這設計了. 對不起 , 可能是我思想太落伍了 , |
|
哈哈哈 所以說安東尼總是有新鮮花樣 賣擱背.....真的看好久才發現其中訣竅XDD |
| 嘿嘿... 輪型又不能坐車囉... 所以 導演 賣擱背 才會去導變型金剛出來地..... |
|
如果這樣的話,那要腳幹嘛?? 會不會直接改用輪型比較好點? |
| 呵呵 機器人坐輪椅 ......... 這個難度有高哦...... |
|
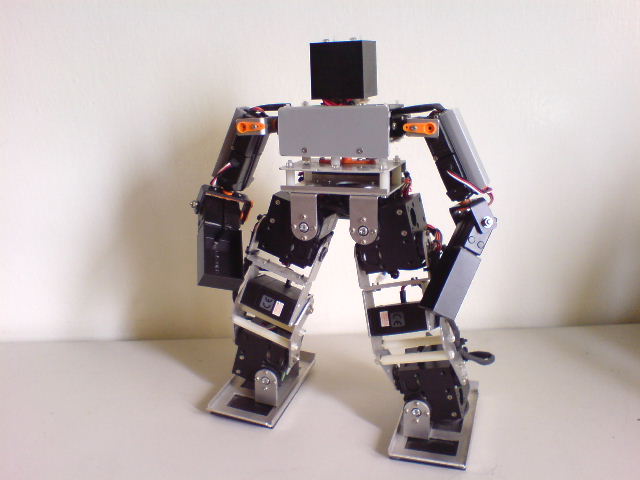
回復 13# avkeith 你說的很對 --> [要如何能保持機械人的整體平衡性 設計者及製作人便要多花心思了] 我認為等身大的機器人,最重要是務實的實用性, 即使你能做到如下圖會走會站的:  但是,如果一推就倒,那就缺乏實用性了(尤其走路時). 所以機器人的安全第一(不容易倒),應該是最優先考慮的. 以各位專家的實力技術能耐, 不必完全跟日本大公司做的 去比較精準及力度, 應該可以使用便宜的各種零件, 做出類似下圖的(可以設計更好看的):  腳掌跟座車連接,所以不容易倒, 腳掌跟座車連接,所以不容易倒,會坐會站, 上半身輕, 手的動作很靈活,會拿東西, 臉部有表情,會說話, 座車不一定自動會走, 如此,可能材料品質不是很優,但差強人意, 對各位也不是很難做, 如果覺得做不到,算是妄自菲薄了. |
|
越做大的 , 其實也會用上更多的機械零件 , 機械零件多表示重量越大 , 成本越高 , 所用的伺服也要越精密 , 伺服越精密 , 控制板也要相對提高速度或其他效能 , 速度或其他效能越好 , 相比耗電也有機會大 , 用上大電流供應 , 相對機身也加重負苛 , 負苛越大侗服也要更大力量 , 這是一個製作巡環 , 要如何能保持機械人的整體平衡性 , 設計者及製作人便要多花心思了  |
回復 mzw2008 做大隻的也沒有多多少錢, 多幾個servo等等... 頂多幾萬元吧 . |
沒關係,現在是9號,所以比較小隻,再慢一點,等到了十幾號的時候..... 長高-->變重-->SERVO要更有力-->變更重--->..........錢越花越多 |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-9 00:36 , Processed in 0.720858 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏
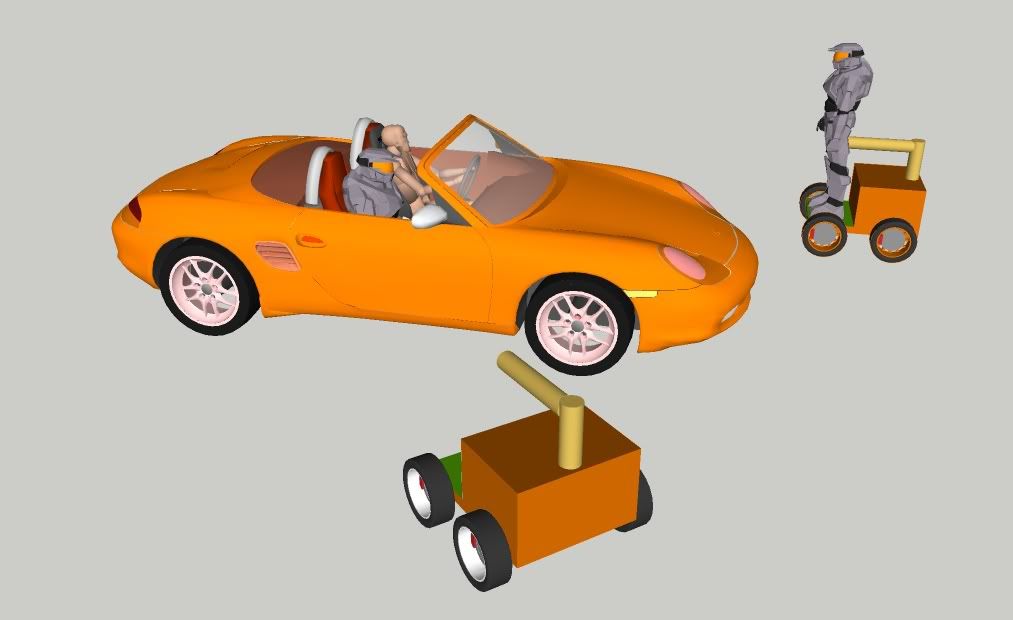 因為要抱機器人上車,如果把機器人做得很重,
因為要抱機器人上車,如果把機器人做得很重,