|
請問 大大能把程式跟接線圖寄給我嗎>"< 想玩看看  z726627@yahoo.com.tw z726627@yahoo.com.tw |
|
想請問一下 補上的程式碼 將原訂的循跡改成利用電阻值範圍控制前後左右 該怎樣寫會比較好 http://search.digikey.com/tw/zh/ ... A103B60NB-ND/303391 (這是要用的電阻圖跟規格) |
| 最近可能用到這個呢 謝謝分享^^ |
只是一個光電晶體,沒有其他放大或解調功能。通常用在近接感測,不是遙控器用的。 瞭解了,謝謝你。 |
請問一下喔,CNY70 模組裏的紅外線接收器跟一般的紅外線接收器(如 TSOP233 ... 只是一個光電晶體,沒有其他放大或解調功能。通常用在近接感測,不是遙控器用的。 |
|
哈哈, 原來是練過的 其實這就是風水輪流轉了 世上想不到的事情多著哩 |
哈哈. 結果十年後的今天你把人家問到招架不住 沒有想到啊~~ 慚愧,慚塊... :) |
這想讓我想起十年前,電腦跟網路開始流行的那個時候 哈哈. 結果十年後的今天你把人家問到招架不住 這是以彼之道還施別人身喔 |
那就慢慢來吧XDD 我紅外線玩上癮了,現在還有好幾個紅外線的題目等著我研究也想玩 Android 了... 也想學硬體... 也想玩自走車, 飛行器 .... 好多東西啊,我會不會太貪心了? 哈~ |
我主要並不是代理 這想讓我想起十年前,電腦跟網路開始流行的那個時候 話說當時我幫親戚買了一台電腦,而且是從台北抱回彰化 我只收電腦購買費用,完全不收其它的 結果,從此我就慘了,因為電腦只要一故障親戚就找我,不管是中毒或office 不會用,什麼都來.... 親戚還認為這是我應該做的咧... 我咧,做公益也不是這樣子做的啊 :( |
還沒有什麼想法說 那就慢慢來吧XDD |
本帖最後由 mzw2008 於 2011-4-11 15:26 編輯 你可以跟客戶說:「不好意思,我們只是代理,技術問題可能要請你問原廠喔。」要不然的話,就乾脆把案子包 ... 我主要並不是代理 我是技術服務提供者 提供這個是要收費, 客戶卻常常覺得是應該的 EX: 買arduino 要求最便宜還要開發票外加幫忙把專題作出來.... EX: 買roboard要求附機器人影像追蹤程式+原始碼, 還要教會他 EX: 買SERVO要求送機器人控制程式, 重點是他才買一顆, 還要殺價外加免運費 ........哈哈 這就好像賣電腦 賣電腦就是多少錢講好就賣了 客戶不會用就是大概說明線如何接, 開機如何開之類的 若是還要求教會XP如何使用,OFFICE 如何作報告, 程式如何寫, 還要求附贈軟體 這就很過頭了 尤其還常看到回來要求免費修理的 , 明明就看到板子已經燒燬還要免費修, 這根本是奧客吧 |
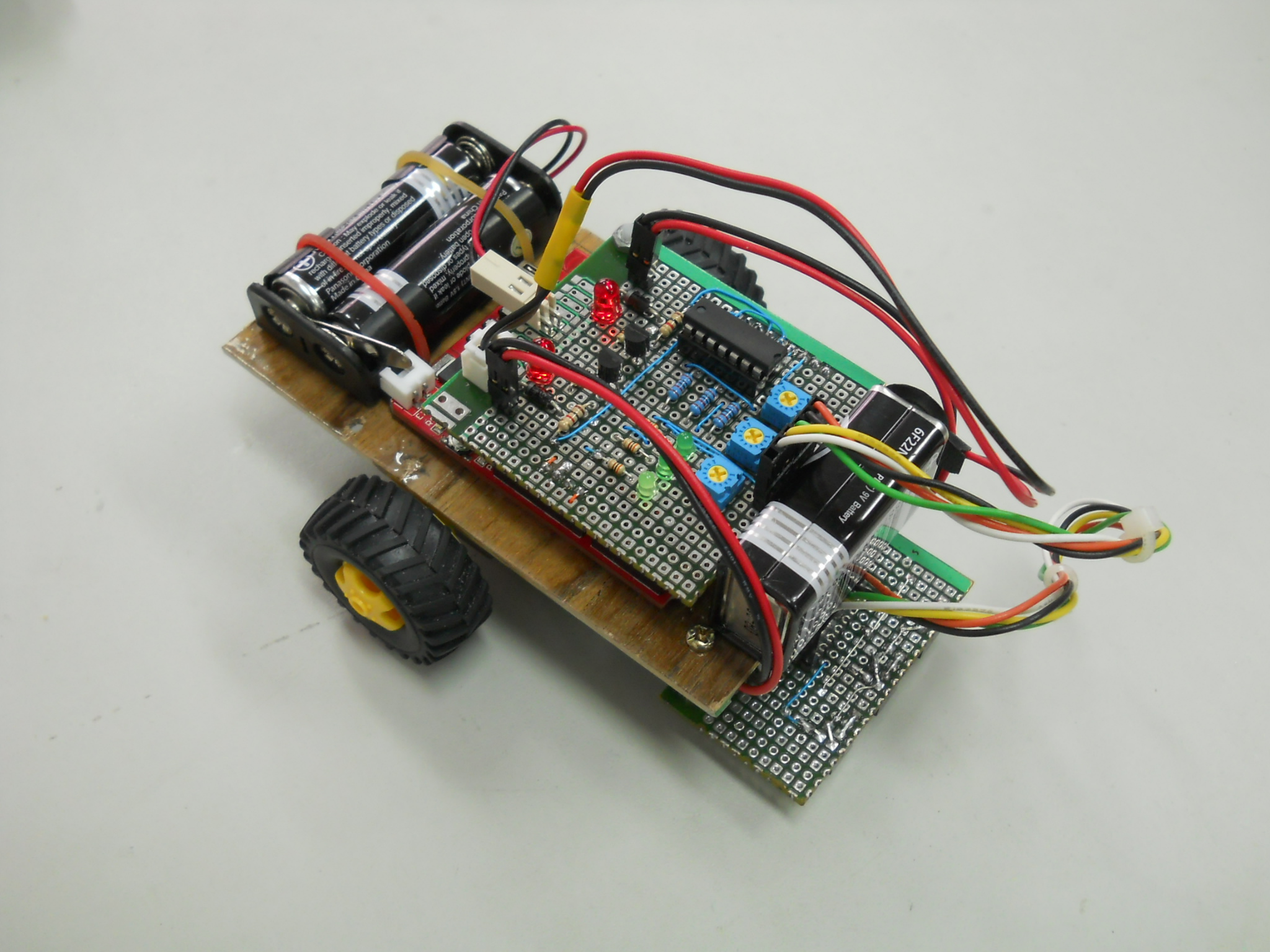
補上程式碼: Curtiss 是學校的老師嗎? 請問一下喔,CNY70 模組裏的紅外線接收器跟一般的紅外線接收器(如 TSOP2338, TSOP4338, PNA4602)有什麼不一樣嗎?它的接收器有解調變的功能(Demodulation)嗎? |
購物網站我其實作好了, 我自己架設自己寫的 你可以跟客戶說:「不好意思,我們只是代理,技術問題可能要請你問原廠喔。」要不然的話,就乾脆把案子包下來做。只是如果是學生的作業,感覺就好像不太好。 想到之前一些代理商賣我們開發套件,就常被我們問到招架不住,然後就只好投降請我們找原廠。這招對我們蠻管用的,哈! |
不敢拆可以叫鯨魚拆 還沒有什麼想法說 沒學過自走車,8051 我也不會,但是還算懂一點 Arduino,所以想說透過 Arduino 來學自走車會不會比較快一點。 |
|
補上程式碼: /* 三感測器自走車程式 -- 感測器訊號輸入為數位訊號 1: white, 0: black -- 雙馬達控制轉向 -- 使用PWM控制馬達轉速, 但無後退動作 狀態與動作 白黑白 直進 (全速) (全速) 黑黑白 左轉 (半速) (全速) 白黑黑 右轉 (全速) (半速) 黑白白 快速左轉 (停止) (全速) 白白黑 快速右轉 (全速) (停止) 白白白 停止 (停止) (停止) */ // constants won't change. They're used here to // set pin numbers: const int SensorLeft = 2; //左感測器輸入腳 const int SensorMiddle = 3; //中感測器輸入腳 const int SensorRight = 4; //右感測器輸入腳 const int MotorLeft = 5; //左馬達輸出腳 const int MotorRight = 6; //右馬達輸出腳 // variables will change: int SL; //左感測器狀態 int SM; //中感測器狀態 int SR; //右感測器狀態 void setup() { // 輸出入椄腳初始設定, 指定為輸入或輸出 pinMode(SensorLeft, INPUT); pinMode(SensorMiddle, INPUT); pinMode(SensorRight, INPUT); pinMode(MotorLeft, OUTPUT); pinMode(MotorRight, OUTPUT); // 預設馬達輸出為 0 (停止) digitalWrite(MotorRight, LOW); digitalWrite(MotorLeft, LOW); } void loop(){ // 讀取感測器狀態值 SL = digitalRead(SensorLeft); SM = digitalRead(SensorMiddle); SR = digitalRead(SensorRight); // HIGH(1) : white region. // LOW(0) : black region. if (SM == LOW) { //中感測器在黑色區域 if (SL == LOW & SR == HIGH) { // 左黑右白, 向左轉彎 analogWrite(MotorLeft, 127); // 左輪半速 analogWrite(MotorRight, 255); // 右輪全速 } else if (SR == LOW & SL == HIGH) { // 左白右黑, 向右轉彎 analogWrite(MotorLeft, 255); // 左輪全速 analogWrite(MotorRight, 127); // 右輪半速 } else { // 兩側均為白色, 直進 analogWrite(MotorLeft, 255); // 兩輪都全速 analogWrite(MotorRight, 255); } } else { // 中感測器在白色區域 if (SL == LOW & SR == HIGH) { // 左黑右白, 快速左轉 //digitalWrite(MotorLeft, LOW); //digitalWrite(MotorRight, HIGH); analogWrite(MotorLeft, 0); // 左輪停止 analogWrite(MotorRight, 255); // 右輪全速 } else if (SR == LOW & SL == HIGH) { // 左白右黑, 快速右轉 //digitalWrite(MotorRight, LOW); //digitalWrite(MotorLeft, HIGH); analogWrite(MotorLeft, 255); // 左輪全速 analogWrite(MotorRight, 0); // 右輪停止 } else { // 都是白色, 停止 //digitalWrite(MotorRight, LOW); //digitalWrite(MotorLeft, LOW); analogWrite(MotorLeft, 0); analogWrite(MotorRight, 0); } } } |
|
購物網站我其實作好了, 我自己架設自己寫的 但還在想要不要公佈的問題 因為一般的客戶很喜歡買個幾百塊東西(甚至還遇過買"一顆幾十元的3號充電電池") 然後問東問西, 問天問地, 問到宇宙如何生成, 生命起源之類的..... 我實在受不了這種 暫時還是以學校和科學園區為主好了 其實你要看購物網站不外乎想要看東西或是買東西 若是要看東西我建議去別人的網站看 若是要買東西, 就簡單多了, 鯨魚什麼都有^^ |
倉庫堆到滿出來? 我留口水了~~ 不要想太多, 倉庫只是個8坪大小的小地方, 不是大潤發那種幾千坪的 目前我已經走不進去了 裡面堆滿各式馬達和無數種類的控制板/機構... 只是真的有感於空間很不夠 想了很久最近才真的在蓋新的鐵皮屋 貼磁磚, 裝冷氣, 接電視、加裝XBOX和Kinect .... 旁邊還規畫要挖個小水池和造景給寶寶玩水用 還有露天咖啡座, 用來聊天招待用 啊....怎麼聽起來這麼像是民宿 ,哈哈 XDD |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-5 05:39 , Processed in 0.193881 second(s), 12 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏