|
這顆阻力很小,通成阻力大的伺服機力量不是真的, 而是突然用齒數差去轉這樣很耗力, |
robocup roboone一台機器人隨便也20幾軸, 關於電量可看看這個, http://scriptasylum.com/rc_speed/lipo.html |
|
如果平行出力讓一顆空檔,一顆出力 不就會讓空檔的那個變成阻力了嗎? 通常用手轉空檔的馬達都可以感受到阻力, 還是我都玩便宜伺服機才有這問題...高檔的阻力就比較小? |
|
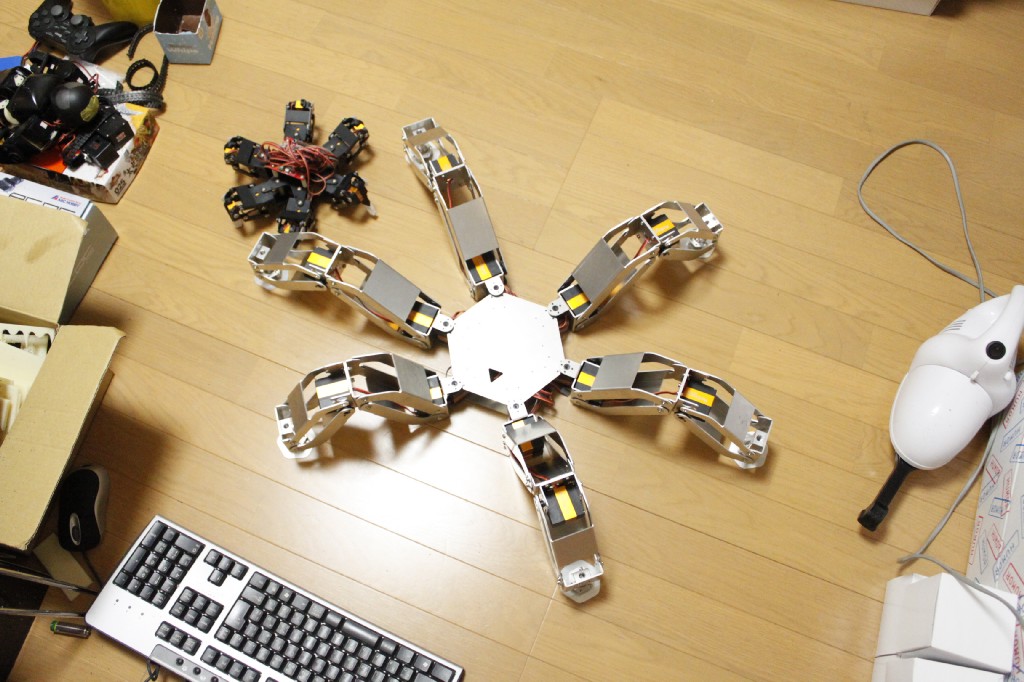
本帖最後由 lakers3411 於 2011-7-17 07:08 編輯 robocup roboone一台機器人隨便也20幾軸, 所以這個24軸算是普普,不過真的是蠻耗電的~ 現在用7.4v 2100mah的鋰電10分鐘就結束了, 這幾天看到的一台R大一定很想試試看的6足 |
|
這顆馬達的全力要消耗不少 那是搭配怎樣的電池呢?! |
|
本帖最後由 lakers3411 於 2011-7-15 19:53 編輯 果然是r大~這樣都被你看穿~小弟也是這樣想~ 再沒有載重物時就是把它斷電一顆,需要時再啟動 感覺像是零的領域~動力全開~ 不過這6足會背上超級重的電池,應該是幾乎要全開 |
|
小弟認為平行設計最主的目的是要應"出力"的時侯"有力" 所以如果純移動不是在「跳躍「及「負重「的一舜間,其實可以把其中一個伺服機"排空檔"(國語)(不用發力的伺服機ppm設定0us),等要發力的時侯再"打檔",這樣的二段出力設定。 |
|
哇, 原來如此 70KG耶...這樣手就要很小心 之前被20KG的夾到就很危險了 尤其這種平行機構又有小縫隙特別容易夾到 |
|
伺服機要設計同步.如果控制板或是軟體不好,就會燒燬, 所以要做這樣設計時要先確認一下自己決定使用的版子&軟體 能否設定完成後,每次開機都直接讀取設定值,不然會讓同步的那 2顆燒燬!! |
| 請仔細再看一下第一節,因為平行雙伺服機出力! |
|
哈哈 讚 看來腳底要貼點防滑片喔 但為何說第一節有70KG呢? |
| 步行起來聽那聲音很有質感,踏~踏~踏~ |
| 不會吧!甩腳時還會打滑哩!實在是大輕了!一定是要拿來賽跑用的! |
|
補上 Laker 剛做好的 簡易 demo 光聽那聲音就很爽了... 這支 全展開有 80 公分長 ........ 不知道 Laker 手 指被夾斷了沒 ... 如果有..... 應該可以申請 殘障補助哦... 哈.... Laker 兄 ... 小心點嘿 |
| 這隻是怪物~ 小心手指夾斷...... 第一節有70kg.cm |
| 哈哈!我最近的工作應該是 Nanny(babysitter )+ 馴獸師,u大有一台大台的還趟在我家,板子裝好了,不過電力我還在傷腦筋,小弟應該去開發一個大電流外接板+伺服機分電盤才可以養大這堆怪獸。 |
| Ray.. 放心 我會帶這支去找你好好的 訓練訓練的...... |
| 不錯! 很有攀巖fu |
| 強! |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2026-7-31 12:07 , Processed in 0.481639 second(s), 11 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.

 分享
分享 收藏
收藏