|
小弟也做了一個類似的東西, 但用的是 MOSFET 不是用 BJT. TX 是用 rc 用的 FF9. RX 是 亞拓的 6動接收 MOSFET 的控制是用 8051 (AT89C2051) 影片連結 : http://www.youtube.com/watch?v=NLrT0pE-4tc 機構還沒做好. 因為 AT89C2051 最快只能跑 24/12=2MHz 的 machine cycle. 所以 PWM 只能解出 25 step. (20us 一個 loop, 從 1ms 到 2ms 只有 50段, 前進後退各 25段) 或許應該找個高級一點的 MCU. |
|
要做完善的設計,真是需要超好的腦袋瓜. 否則想到什麼,就設計,設計之後就急於做出來, 可能有點樂趣, 卻可能因為花費時間花費金錢, 就與更大的目標,失之交臂. |
|
本帖最後由 marbol 於 2011-3-12 19:37 編輯 試試看,蝦虎 機器人(Shrimp robot)~~ http://www.youtube.com/watch?v=uqQPWTr7YVk 動畫 http://www.youtube.com/watch?v=WnUyb-XCbMg 實物 |
|
題外話,我很喜歡看Discovery的《機械科技兄弟檔》Howe & Howe Tech 節目, 這裡是他的官網http://dsc.discovery.com/tv/howe-and-howe-tech/ 他們的工廠甚麼都能做,還常常突發奇想做些市場沒有的東西, 光是看一些軍方的案子,在那裏做機搶射擊和road side bomb測試就很過癮:D 台灣應該也有這樣的民間公司吧,感覺M大的公司就很類似, 裏頭的工程師好像都有三頭六臂的樣子:D |
|
一樣的東西,檔次不一樣,參考看看。 http://tw.myblog.yahoo.com/sn903209ss http://blog.livedoor.jp/robolabo/?blog_id=1929744 <--裡面的影片看一下,很棒 "厲害"的是演算法,"漂亮"的是硬體,缺一就啥都不是。 |
|
研究發展這個,也不單是為了想賺錢, 畢竟大家都已覺悟,賺錢的機會渺茫. 我想我研發這個,是為了一種使命及興趣及打發時間, 有一點很重要,便是金錢控管的得宜, 不要說花了大把鈔票卻危及家庭的經濟能力. g921002的研發精神令人佩服,祝福你能口袋依然寬鬆,家庭和樂, 有什麼需要我或網友幫忙的,不必客氣,請提出來討論. |
|
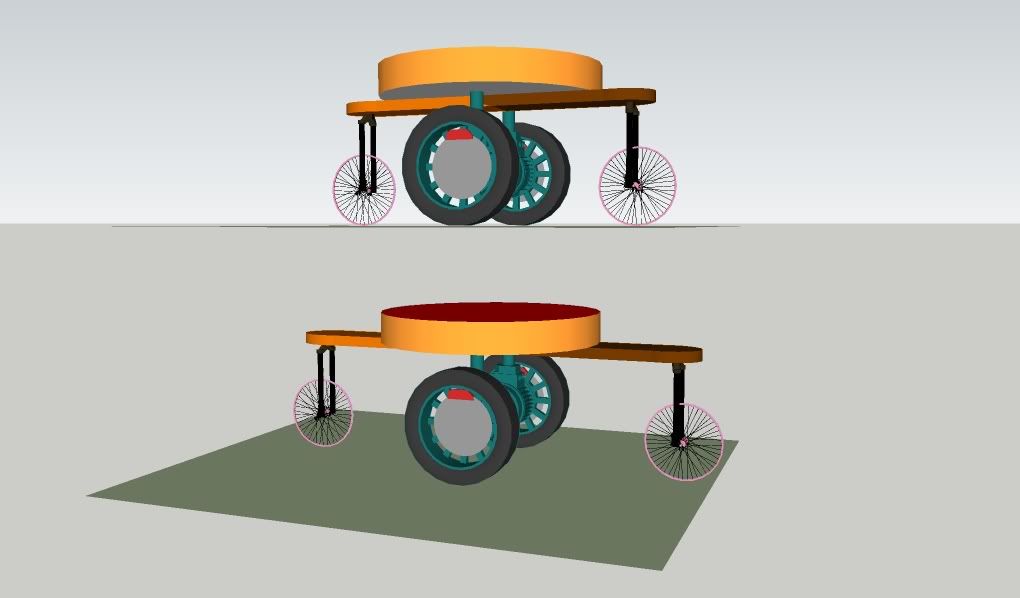
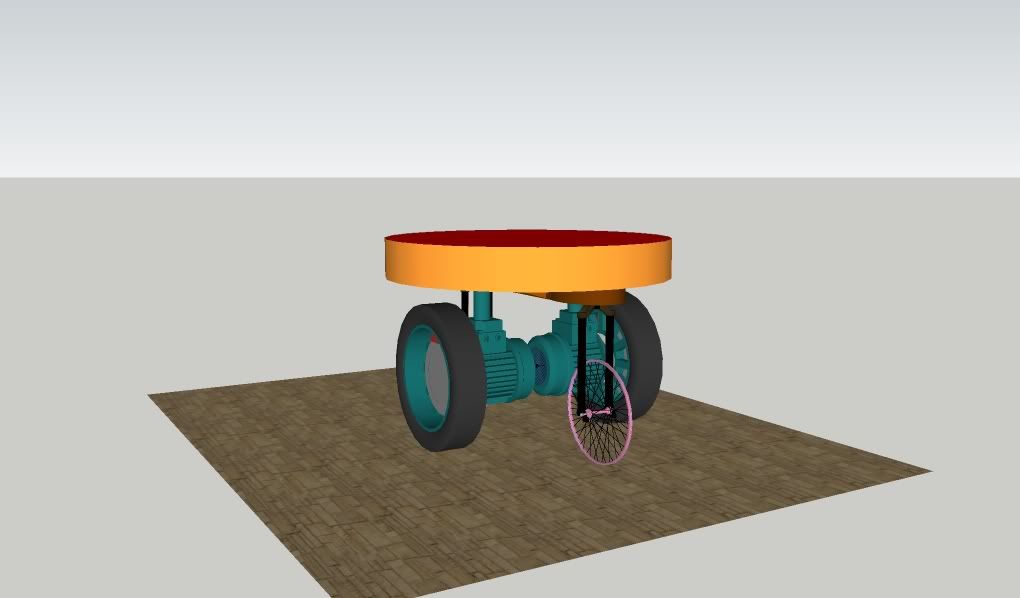
看到g921002你的作品,我心裡想著不曉得落後幾年. 更何況g921002 更涉獵 無人飛行載具(Unmanned Aerial Vehicle, UAV), 這裡應該沒人跟得上. 雖然如此,我還是發表一點個人想法,大夥兒就隨便聽聽. 雖然這台原型驗證車是很棒,但是並不符合我所描述: >>[可以在馬路上跑得快,又可以在一般家庭的小房間內運行自如] 一台能原地旋轉,比較像Pololu 3pi robot: 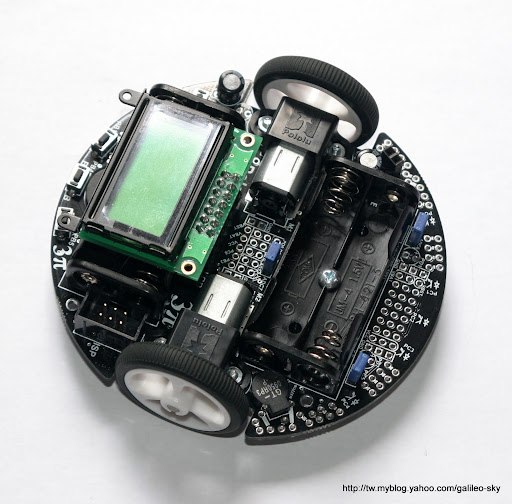 前後各再加裝一個萬向輪, 另外Front Camera應該不是 for Road recognizing, 因為馬路車多變化大, 應該是for ? 目前不確定,只是這是不實用的辯識方式. 這台原型驗證車,畢竟是全球陸上無人機(UGV),其目的是為國防科技等特別用途, 而非為一般家庭使用,所以內部構造有差異, 每一種車都有它的重點特色, 將來非常有商業價值的實用性車子: 第一,在室內成為機器人的載具. 第二,亦在馬路上取代現在的汽油摩托車(所以可以載一人). |
|
這樣他會有暴力傾向 晚點晚點.....  |
|
nichal 老大 趕快做一台這個 你家的老大會用到XDD |
|
g大真是一針見的 (心有慼慼焉.....) |
| g大看完你的傑作,請受小弟一拜。真高手。 |
回復 nichal 您想太多了。這種東西俺已經做過了。我可以告訴你在台灣,要達到商用目標,至少10年內「沒有前途」。 http://diydrones.ning.com/profiles/blogs/my-ugv <-原型驗證車,當初驗證演算法特地作的平台,SENSOR跟老美的UGV規格一樣。你要先做驗證車,你準備投入多少? 1.這東西是跨領域的,需要的是一個TEAM,以MIT的UGV TEAM來說,成員超過30人,博士學歷占2/3。年度預算400萬美金。而台灣沒這條件。 2.法規配合,使用無人化的東西是需要法規來配合。UAV要空域開放,UGV要遵守交通法規。如果只想玩到電腦鼠規模,就不必了。 3.車輛維修、改裝、零件供應是UGV供應鏈最末端,利潤最低,競爭最高、最沒門檻。若您的技術在這,絕對有生意,只是餓不死。 |
|
本帖最後由 nichal 於 2011-3-7 13:36 編輯 如果站在營利的立場來看 短時間內小六足能夠創造的經濟報酬率可能比較低 但站在技術開發的角度來看 小六足會比單純只控制兩個馬達來得有前景 有輪子的 就是要在有路的地方跑 沒有路的地方 就是得用腳去走(再不然就要會飛) 對我來說 我還是對馬達控制器感興趣一點 人的興趣太多就很難專精 我相信單做好一個GPS sensor, gyro, G sensor.... 就已經夠強了! 因為他們都需要很複雜的運算與誤差補償 真的要搞運算跟系統 還是要一個團隊才有辦法 只靠自己的能力做出來的成效是很有限的..... (更何況這東西已經很多比我厲害N倍的人在做了) |
|
一個非履帶車,若兩個輪子各自使用不同的馬達驅動旋轉, 若有轉速的差異,則車子會朝轉慢的一方偏行,最後成為繞圓圈, 兩個輪子轉速差距愈大,則圓圈越小, 因此控制轉向,便是控制兩個輪子的轉速, 在高速行駛時,由電腦控制,應該能輕易保持一直線?! |
小黑屋|手機版|Archiver|機器人論壇 from 2005.07
GMT+8, 2024-5-10 12:14 , Processed in 0.247223 second(s), 10 queries , Apc On.
Powered by Discuz! X3.2
© 2001-2013 Comsenz Inc.


 分享
分享 收藏
收藏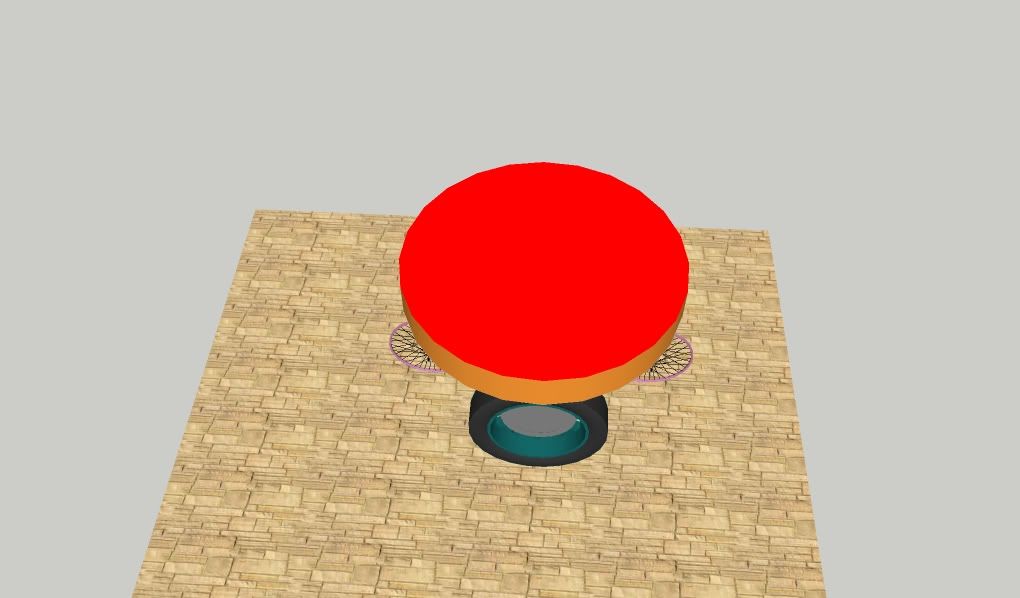 -----------------------
----------------------- ----------------------
----------------------