|
|
本帖最後由 leonids 於 2010-12-16 14:40 編輯
文章還是用中文吧,會說得詳細點(其實是英文不好... )
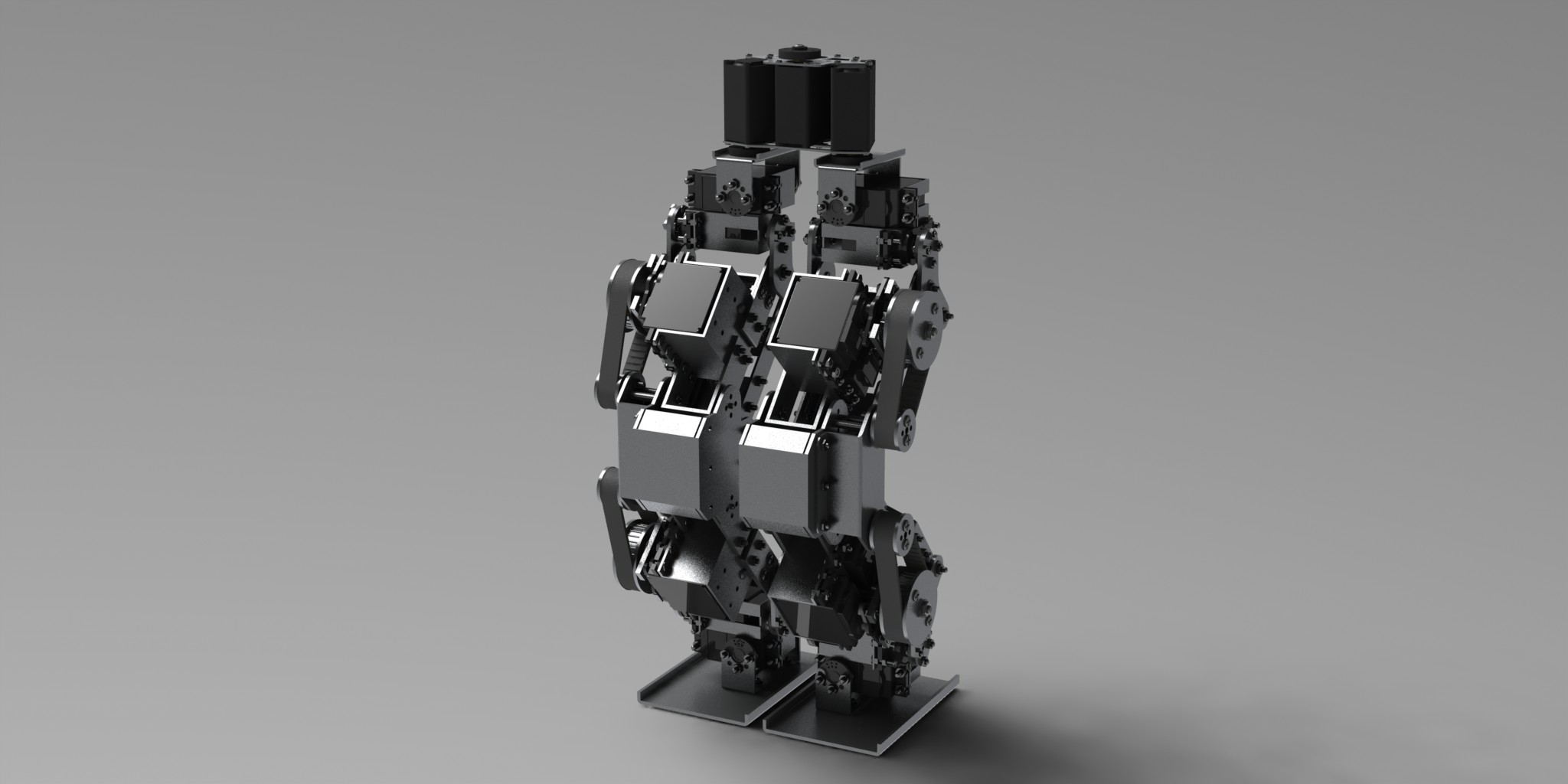
Parallelogram(簡稱Parallel)的下半身設計初步定下來了,如下圖所示(未經輕量化)

這條腿看起來與以往的人形機械人有少許不同,這是因為我設計了一個角速度加速系統放在上面,何謂角速度加速系統?
簡單的說明一下,在同一力矩下,當需要承受較大的外力時,力臂需要縮短,反之增長,(M=F*l)
看作功率不變的話,當每個SERVO的力矩都是一樣,如果把SERVO用機械方法並聯的話,實際力矩就會增大1倍甚至更多,
再根據我經驗和不精確計算,在重量3-4kg,高度在40cm以下的人形機械人,腿上單個自由度力矩用14kg*cm的SERVO可以湊合使用,
有鑑於此,我利用了兩個20kg*cm的SERVO並聯,理論力矩為20kg*cm+20kg*cm=40kg*cm,
由於40kg*cm在沒有機械人以外的外力施加下,根本用不了這麼大的力矩,所以用齒形帶輪把40kg*cm的力矩經過傳動比加速成17-20kg*cm,而角速度由原來的0.14sec/60°變成0.059-0.07sec/60°,這樣可以加快腿上關鍵幾個關節的角速度,再利用平行四邊形的方法設計腿部,把屈曲的速度再翻一倍,這樣角速度加速系統就誕生了.
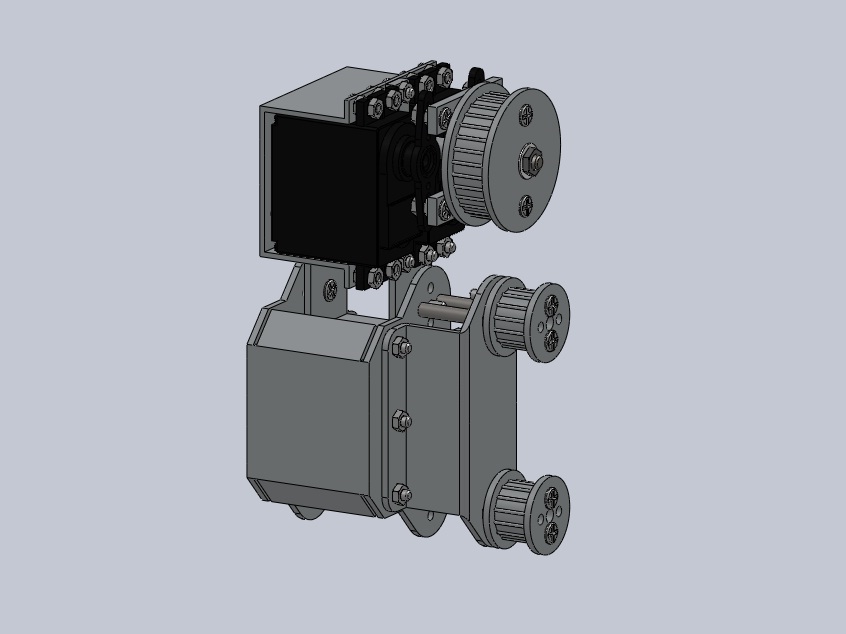
角速度加速系統核心部分如下圖所示(未畫上齒形帶)
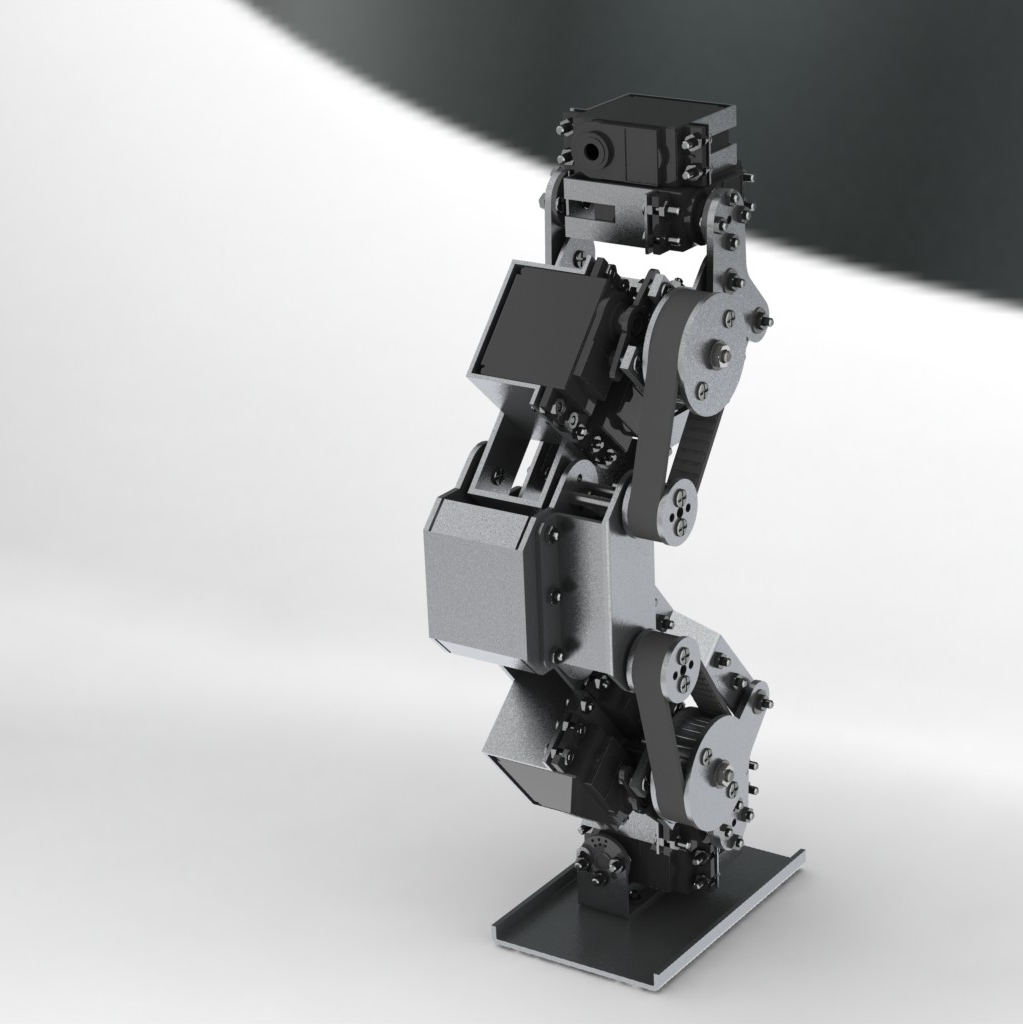
單條腿和屈曲過程如下圖所示
加快角速度的目的是為了令Parallel的走路,跑步,甚至跳躍,可以比同級的其他人形機械人做得更快,更高.無論程序寫得怎樣,最起碼可以在機械結構上得到比其他人形機械人更大的優勢.
在接下來的一個月我會找時間把整輛機械人設計出來給大家觀看
最後放上Aurora(LI03)的上身和Parallel(LI04)的下身MIX在一起的人形機吧~在我角度看來這樣合體有點不人道...為了效果,沒辦法啦~哈哈
|
|







 發表於 2010-12-14 23:05:10
發表於 2010-12-14 23:05:10

 收藏
收藏 分享
分享



 看到了,謝謝!
看到了,謝謝! 樓主
樓主